Riassunto di Analisi I
Capitolo Uno: Insiemi numerici
1.1 Insieme N
- N contiene tutti i numeri naturali (interi senza segno)
- \mathbb{N} = \{0, 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, \dots\}
- In N è definita una relazione d’ordine:
- \exists j \in \mathbb{N} : m + j = n \implies n > m
- Proprietà:
- Riflessiva
- Antisimmetrica
- N \ge M, M \ge N \implies N = M
- proprietà senza nome:
- n \ge m \implies n + j \ge m + j
- Operazioni definite sull’insieme:
- Somma:
- Proprietà:
- Associativa
- Commutativa
- Ammette elemento neutro: 0
- Proprietà:
- Prodotto
- Proprietà:
- Commutativa
- Associativa
- Distributiva rispetto alla somma
- Ammette elemento neutro: 1
- Proprietà:
- Somma:
- N è anche definito da una definisione assiomatica
(di Peano), composta dalle seguenti parti:
- Un oggetto che si chama Zero (Z) è un numero
- Ogni numero (N) ha un successivo (N’)
- Z non è il successivo di nessun numero
- Se due numeri hanno lo stesso successivo allora sono lo stesso numero
- Il successivo di una somma di due numeri è uguale alla somma di uno dei due numeri con il successivo dell’altro
- Postulato d’induzione completa:
- \begin{cases} \text{M è una classe di numeri} \\ \Z \in M \\ n \in M \implies n' \in M \end{cases} \implies \text{M contiene tutti i numeri}
1.2 Principio d’induzione
Serve per dimostrare proposizioni per induzione e si attua in due step [data una preposizione P]:
- Dimostro che P(0) è vera
- Supponendo che P(n) sia vera, dimostro che P(n+1) è vera
Per esempio, voglio dimostrare che: \sum_{k=0}^n k = \frac{n(n+1)}{2}
Prima dimostro che la preposizione è vera con n = 0:
P(0): \sum_{k=0}^0 k = \frac{0(0+1)}{2} = 0
Poi, supponendo che sia vera per n, la dimostro per n+1:
P(n+1): \sum_{k=0}^{n+1} k = \sum_{k=0}^n k + (n+1) = \frac{n(n+1)}{2} + (n+1) = \frac{n(n+1) + 2(n+1)}{2} = \frac{(n+1)(n+2)}{2} = \frac{(n+1)((n+1)+1)}{2}
1.3 Insieme Z
- Contiene tutti i numeri interi con segno:
- \mathbb{Z} = \{0, \pm 1, \pm 2, \dots \}
- Relazione di equivalenza:
- Due numeri relativi sono uguali se il segno è uguale e il valore assoluto (numero senza segno) dei numeri è uguale
- Relazione d’ordine:
- Se il segno è dierso, il numero con segno positivo è maggiore, se il segno è uguale, allora se il segno è negativo, il numero con valore assoluto maggiore è il minore, il contrario se i due numeri hanno segno positivo.
- Le operazioni definite sull’insieme Q sono le stesse definite sull’insieme N ma si tiene conto del segno
1.4 Insieme Q
- Contiene tutte le frazioni
- Q = \left\{ \frac{n}{m} : n \in \Z, m \in \N^+ \right\}
- Relazione d’ordine:
- \frac{n}{m} \gt \frac{n'}{m'} \iff n \times m' \gt n' \times m
- Idem per <
- Relazione di equivalenza:
- \frac{n}{m} = \frac{n'}{m'} \iff n \times m' = n' \times m
- Operazioni definite sull’insieme:
- Sia somma che prodotto hanno le stesse proprietà definite per N e Z
- \frac{n}{m} + \frac{h}{k} = \frac{n \times k + h \times m}{m \times k}
- \frac{n}{m} \times \frac{h}{k} = \frac{n \times h}{m \times k}
- In più, ogni elemento ha un proprio inverso:
- \frac{n}{m} \times \frac{m}{n} = 1 \qquad (con\,n \ne 0)
1.5 Irrazionalità della radice di 2
Per dimostrare che sqrt(2) è irrazionale, bisogna procedere per assurdo, ma prima serve conoscere una definizione di numeri pari e dispari:
n \text{ è pari} \iff n = 2k \\ n \text{ è dispari} \iff n = 2k + 1
Ora, pre assurdo, supponiamo che sqrt(2) sia un numero razionale, quindi
\sqrt{2} = \frac{n}{m} \qquad \text{(con n e m primi tra loro)}
ma allora
2 = \frac{n^2}{m^2} \implies m^2=2n^2
e quindi vuol dire che m è pari e, siccome m ed n sono primi tra loro, ciò vuol dire che n è dispari. Ma allora, riscrivendo m in funzione di k abbiamo che m = 2k e, di conseguenza,
\begin{align*} m^2 &= 2n^2 \\ (2k)^2 &= 2n^2 \\ 4k^2 &= 2n^2 \\ 2k^2 &= n^2 \end{align*}
il che significherebbe che n è pari, ma questo va contro l’ipotesi, per cui la radice di 2 è irrazionale.
1.6 Insieme R
Un numero reale è un qualsiasi numero razionale o meno
R = \left \{ \frac{n}{m} : n \in \Z, m \in \N^+ \} \cup \{ \sqrt{2}, \pi, e, \dots \right \}
Le operazioni, le loro proprietà e le varie relazioni sono le stesse di Q e Z.
Dato un insieme A tale che A \subset R allora A ammette una serie di numeri interessanti:
a^* \in A \text{ si dice massimo di A se } a^* \ge a \,\forall a\in A
a^* \in A \text{ si dice minimo di A se } a^* \le a \,\forall a\in A
Se A è superiormente limitato, si dice Estremo superiore di A il minimo dei suoi maggioranti, e, se A è inferiormente limitato, si dice Estremo inferiore di A il massimo dei suoi minoranti (a patto che A abbia maggioranti/minoranti).
\text{Se A è superiormente limitato, un maggiorante di A è ogni numero } k \in \R : k \ge a \forall a \in A \\ \text{Se A è inferiorimente limitato, un minorante di A è ogni numero } k \in \R : k \le a \forall a \in A
Teorema di completezza di R: in R, l’estremo superiore di un insieme superiormente limitato esiste sempre. Idem per l’estremo inferiore.
1.7 Topologia in R
Se A \subset R allora
- x_0 \text{ è un punto interno di A se } \exist \delta : (x_0 - \delta, x_0 + \delta) \subset A
- x_0 \text{ è un punto esterno di A se } \exist \delta : (x_0-\delta, x_0+\delta) \cap A = \emptyset
- x_0 \text{ viene detto di frontiera se } \forall \delta \in (x_0 - \delta, x_0 + \delta) \text{ cadono sia punti interni che punti esterni di A}
- x_0 \text{ viene detto isolato se } \exist \delta : (x_0 - \delta, x_0 + \delta) \cap A = \{x_0\}
Questo significa che se abbiamo un insieme A = [1, 3) \cup {5} allora
| X = | caratteristica |
|---|---|
| 2 | è interno |
| 1 | è di frontiera |
| 3 | è di frontiera |
| 4 | è esterno |
| 5 | è isolato (e quindi anche di frontiera) |
| (1,3) | è interno |
L’insieme A si dice aperto se ogni punto è interno (non ha punti di frontiera), quindi quando è espresso nella forma A = (a, b) mentre si dice chiuso se contiene tutti i suoi punti di frontiera (l’insieme dell esempio precedente non contiene ne a ne b che sono i suoi punti di frontiera)
- \text{Se A è chiuso, allora } A^c \text{ è aperto e viceversa}
- Esistono insiemi che non sono ne aperti ne chiusi: A = [a, b)
- Esistono insiemi sia aperti che chiusi: A = \R \\ A = \emptyset
- Dato un insieme A, la frontiera di A si indica con $ A$
- Si chiama chiusura di A A \cup \partial A
- Si chiama parte interna di A \bar A = \left \{\text{l'insieme dei punti interni di A} \right \}
Di seguito alcuni esempi per chiarire:
A = (a, b) \\ A \cup \partial A = [a, b] \\ \overline {A \cup \partial A} = (a, b)
A = (0, 1) \cup (1, 3) \\ A \cup \partial A = [0, 3] \\ \overline {A \cup \partial A} = (0, 3)
A = [0, 2] \cup {3} \\ \bar A = (0, 2) \\ \bar A\cup \partial \bar A = [0, 2]
Se chiudo e riapro un insieme, potre non arrivare all’insieme di partenza (è più grande).
Se Apro e richiudo un insieme, potre non arrivare all’insieme di partenza (è più piccolo, perde i punti isolati).
| Insieme | Apertura/chiusura |
|---|---|
| (3, +\infty) | aperto |
| [3, +\infty) | chiuso |
Definiamo “intorno di un punto” come ogni intervallo aperto a cui appartiene il punto stesso.
\char"1D4B0 (x_0) = \big \{ \text{Ogni intervallo aperto che contiene } x_0 \big \}
Ad esempio \char"1D4B0 (27) = \R, (26.8, 27.1), (-1, 31).
Definiamo chiusura di R come \R \cup \partial \R = \R \cup \{\infin, -\infin\}.
Si dice intorno di +\infty qualsiasi intervallo del tipo \char"1D4B0 (\infin) = (a, 0) \qquad \forall a \in \R
Punto di accumulazione: x_0 è un punto di accumulazione per A se in ogni \char"1D4B0 (x_0) cadono infiniti punti di A.
Ad esempio, se A = (0, 1] i punti di accumulazione possono essere 0, 1, \frac{1}{3}, \frac{1}{2}, \dots.
Esempio finale:
A = \bigg\{\frac{1}{n} : n \in \N, n \gt 0 \bigg \} \subset \R
- A non ha punti interni
- A ha soltanto punti isolati
- A ha 0 come unico punto di accumulazione
1.8 Cardinalità di insiemi finiti, numerabilità di Q e non numerabilità di R
La cardinalità di un insieme è il numero di elementi che contiene. Se
un insieme è infinito, però non è sempre facile dire quanti elementi
contiene: come posso dire se N ha più o meno elementi di R? Entrambi
hanno infiniti elementi, ma il tipo di infinito è diverso: esistono
infiniti numerabili e infiniti non numerabili. Se posso associare a ogni
elemento di un insieme un numero naturale, allora l’insieme è
numerabile, altimenti non lo è. N, Z, e Q sono numerabili, infatti posso
associare ad ogni loro un numero naturale:
N: \{(0, 0), (1, 1), (2, 2), (3, 3), \dots\} \\
Z: \{(0, 0), (1, 1), (2, -1), (3, 2), (4, -2), \dots\} \\
Per Q, la faccenda è un po’ più complicata, ma basta seguire il
concetto illustrato nella seguente immagine: 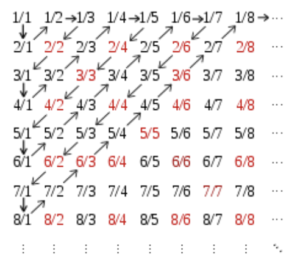 In questo modo, per ogni elemento di Q, posso associare un numero
naturale.
In questo modo, per ogni elemento di Q, posso associare un numero
naturale.
Dimostrazione della non numerabilità di R
Dimostriamo prima che in R ci sono tanti elementi quanti ce ne sono in (0, 1) e successivamente che (0, 1) non è numerabile (di conseguenza, visto che contengono lo stesso numero di elementi, R non è numerabile). Troviamo una funzione biiettiva che associa ad ogni elemento di R un solo numero di (0, 1).
Sia f : R \to (0, 1) la funzione che ritorna la coordinata X del punto di intersezione tra una semicorconferenza di raggio \frac{1}{2} e di centro (\frac{1}{2}, \frac{1}{2}) con un segmento che parte dallo stesso punto e ha come punto finale il punto di coordinate (r, 0) con r parametro della funzione.
Qui visualizzazione pratica della dimostrazione
Ora dimostriamo che (0, 1) non è numerabile. La dimostrazione avviene per assurdo: supponiamo che sia possibile numerare tutti gli elementi di (0, 1) e iniziamo a scriverne qualcuno:
0.1324 \dots \\ 0.5000 \dots \\ 0.1298 \dots \\ 0.3328 \dots \\
Ignorando lo zero prima del punto decimale, del primo numero prendiamo la prima cifra, del secondo la seconda e così via, poi vi sommiamo uno (se il risultato fosse 10, allora consideriamo solo lo 0)
0.1324 \dots \to 1+1 = 2\\ 0.5000 \dots \to 0+1 = 1\\ 0.1298 \dots \to 9+1 = 0\\ 0.3328 \dots \to 8+1 = 9\\
Ora alla lista aggiungiamo un nuovo numero composto da zero virgola tutte le nuove cifre che abbiamo trovato (0,2109) e notiamo che non è presente nella lista (infatti è impossibile che sia presente nella lista, c’è sempre almeno una cifra differente da tutti i numeri già presenti).
Se ripetiamo il processo infinite volte, non finiremo mai, quindi (0, 1) non è numerabile. Siccome (0, 1) non è numerabile ed è possibile associare ad ogni elemento di (0, 1) un elemento di R e civecersa, allora anche R non è numerabile.
1.9 Numeri complessi
I numeri complessi numeri basati sull’esistenza del numero i chiamato anche Unità Immaginaria.
i^2 = -1 \\ i = sqrt(-1) \\
Z \in \char"2102 \iff Z = a + ib \qquad \text{ con } a, b \in \R \\ Re(Z) = a \\ Im(Z) = b \\
Esistono varie forme di numeri complessi:
- Forma esponenziale: Z = r e^{i \theta}
- Forma trigonometrica: Z = r (\cos \theta +
i \sin \theta)
- r è detto modulo di Z
- \theta è detto argomento di Z
- Forma algebrica: Z = a + ib
Ogni numro ha anche un coniugato, che è il numero complesso ottenuto invertendo il segno della parte immaginaria:
Z = a + ib \implies \overline{Z} = a - ib \\
Si può trasformare un numero in ciascuna delle forme di cui sopra in ogni altra forma:
- Da algebrica a trigonometrica:
r = sqrt(a^2 + b^2) \\ \theta = \begin{cases} arctan ( \frac{b}{a} ) & x > 0 & \text{I e IV quadrante} \\ arctan ( \frac{b}{a}) + \pi & x < 0 & \text{II e III quadrante} \\ \frac{\pi}{2} & x = 0, y > 0 & \text{Asse Y tra il I e il II quadrate} \\ -\frac{\pi}{2} & x = 0, y < 0 & \text{Asse Y tra il III e il IV quadrante} \\ \text{Indeterminato} & x = 0, y = 0 & \text{Origine} \\ \end{cases}
- Nota: si può fare ad’occhio , senza memorizzare tutte le condizioni di \theta: se sta tra il III e IV quadrante, basta callcolare arctan(\frac{b}{a}) e aggiungere \pi. Per i casi particolari (assi e origine) è ovvio.
- Da trigonometrica/esponenziale a algebrica:
- Basta calcolare cos(\theta) e sin(\theta) e moltiplicare per r.
- Da algebrica/trigonometrica a esponenziale:
- Basta calcolare r e \theta come nella forma trigonometrica e scriverli nella forma r \times e^{i\theta}
Le varie forme servono per gestire meglio i calcoli. Di seguito formule per le varie operazioni con le varie forme (e, dove utile, anche la descrizione di cosa succede al grafico)
\text{Forma algebrica (Comoda per addizioni, sottrazioni, moltiplicazioni e divisioni)} \\ (a + ib) + (c + id) = (a + c) + i(b + d) \\ (a + ib) \times (c + id) = (ac - bd) + i(ad + bc) \\ \frac{a + ib}{c + id} = \frac{(a + ib)(c - id)}{(c + id)(c - id)} = \frac{(ac + bd) + i(bc - ad)}{c^2 + d^2} \qquad \text{Notare che la divisione è impossibile se $c = d = 0$} \\
\text{Forma trigonometrica (Comoda per moltiplicazioni, divisioni, radici e potenze)} \\ \rho(\cos \theta + i \sin \theta) \times r(\cos \alpha + i \sin \alpha) = \rho r (\cos (\theta + \alpha) + i \sin (\theta + \alpha)) \\ \left[ \rho(\cos \theta + i \sin \theta) \right]^n = \rho^n (\cos n \theta + i \sin n \theta) \\
Dimostrazione del prodotto di due numeri complessi
Dati due numeri complessi
Z = \rho(\cos \theta + i \sin \theta) \\ W = r(\cos \alpha + i \sin \alpha) \\
allora
\begin{align*} Z \times W = \rho(\cos \theta + i \sin \theta) \times r(\cos \alpha + i \sin \alpha) &= \rho r \times (\cos \theta + i \sin \theta) \times (\cos \alpha + i \sin \alpha) \\ &= \rho r \times(\cos \theta \cos \alpha + i \cos \theta \sin \alpha + i \sin \theta \cos \alpha - \sin \theta \sin \alpha) \\ \text{Riordinando i vari seni e coseni:} \qquad &= \rho r \times \left[ (\cos \theta \cos \alpha - \sin \theta \sin \alpha) + (\sin \theta \cos \alpha + \cos \theta \sin \alpha) \right] \\ &= \rho r \times (\cos (\theta + \alpha) + i \sin (\theta + \alpha)) \\ \end{align*}
Radici di un numero complesso
Dato un numero complesso Z = \rho(\cos \theta + i \sin \theta) e W = r(\cos \alpha + i \sin \alpha) allora se W^n = Z allora r^n(\cos n \alpha + i \sin n \alpha) = \rho(\cos \theta + i \sin \theta) e quindi
\begin{cases} r^n &= \rho \\ n \alpha &= \theta + 2k \pi \qquad \text{con } k \in \mathbb{N} \\ \end{cases} \implies \begin{cases} r &= \sqrt[n]{\rho} \\ \alpha &= \frac{\theta}{n} + \frac{2k \pi}{n} \qquad \text{con } 0 \le k \le n-1, k \in \mathbb{N} \\ \end{cases}
Per esempio
\begin{align*} W = \sqrt[4]{-4} &= \sqrt[4]{4(\cos \pi + i \sin \pi)} \\ &= \begin{cases} r &= \sqrt[4]{4} = \sqrt{2}\\ \alpha &= \frac{\pi}{4} + \frac{2k \pi}{4} \qquad \text{con } k = 0, \dots, 3 \\ \end{cases} \end{align*}
Dopo aver calcolato i vari r (ce ne possono essere più di uno) e i vari \theta, prendo tutte le combinazioni valide dei vari r e \theta e le scrivo:
\begin{align*} k = 0, \quad & \alpha = \frac{\pi}{4} & \implies W_0 &= \sqrt{2}(\cos \frac{\pi}{4} + i \sin \frac{\pi}{4}) \\ k = 1, \quad & \alpha = \frac{3 \pi}{4} & \implies W_1 &= \sqrt{2}(\cos \frac{3 \pi}{4} + i \sin \frac{3 \pi}{4}) \\ k = 2, \quad & \alpha = \frac{5 \pi}{4} & \implies W_2 &= \sqrt{2}(\cos \frac{5 \pi}{4} + i \sin \frac{5 \pi}{4}) \\ k = 3, \quad & \alpha = \frac{7 \pi}{4} & \implies W_3 &= \sqrt{2}(\cos \frac{7 \pi}{4} + i \sin \frac{7 \pi}{4}) \\ \end{align*}
Di seguito il disegno delle radici di -4: Geogebra
Note: - Se r = 0 allora è solo l’origine, non serve combinarlo con i vari theta - Se r < 0 allora lo scarto
Elevazione ad un numero complesso
Se x \in \R allora
e^x = \lim_{n \to \infty} \left( 1 + \frac{x}{n} \right)^n
Il teorema di monotonia assicura che il limite esiste infatti la funzione è limitata e ammette limite superiore. Cosa succede se x \in \mathbb{C}? [Nel seguente procedimento, al posto di x verrà utilizzato Z per evitare confusione]
Z = x + iy \in \mathbb{C} \\ e^Z = \lim_{n \to \infty} \left( 1 + \frac{Z}{n} \right)^n = \lim_{n \to \infty} \left( 1 + \frac{x + iy}{n} \right) \\ \text{Chiamo } W_n = \frac{x + iy}{n} = \left( 1 + \frac{x}{n} \right) + i \left( \frac{y}{n} \right) \\ |w_n|^2 = \left( 1 + \frac{x}{n} \right)^2 + \left( \frac{y}{n} \right)^2 = 1 + \frac{2x}{n} + \frac{x^2}{n^2} + \frac{y^2}{n^2} \\ \implies |W_n| = \sqrt{1 + \frac{2x}{n} + \frac{x^2 + y^2}{n^2}}
Con n \to \infty allora W \to 1
\arg{W_n} = \arctan{\frac{\frac{y}{n}}{1 + \frac{x}{n}}} = \arctan{\frac{y}{n + x}} \\
Ora riscrivo il tutto in forma trigonometrica
W_n^n = \left( \sqrt{1 + \frac{2x}{n} + \frac{x^2 + y^2}{n^2}} \right)^n \left( \cos \left( n \arctan{\frac{y}{n + x}} \right) + i \sin \left( n \arctan{\frac{y}{n + x}} \right) \right) \\
Quindi
\begin{align*} e^Z = \lim_{n \to \infty} W_n^n &= \lim_{n \to \infty} \left[ \left( \sqrt{1 + \frac{2x}{n} + \frac{x^2 + y^2}{n^2}} \right)^n \left( \cos \left( n \arctan{\frac{y}{n + x}} \right) + i \sin \left( n \arctan{\frac{y}{n + x}} \right) \right) \right] \\ &\sim \lim_{n \to \infty} \left[ \left( 1 + \frac{2x}{n} + \frac{x^2 + y^2}{n^2} \right) ^ \frac{n}{2} \left( \cos y + i \sin y \right) \right] \\ &\sim \lim_{n \to \infty} \left[ e^{\frac{n}{2} \ln \left( 1 + \frac{2x}{n} + \frac{x^2 + y^2}{n^2} \right) } \left( \cos y + i \sin y \right) \right] \\ &\sim \lim_{n \to \infty} \left[ e ^ {\frac{n}{2} \times \frac{2x}{n}} \left( \cos y + i \sin y \right) \right] \\ &= e^x \left( \cos y + i \sin y \right) \\ \end{align*}
Di seguito alcuni esempi: - e^{i \theta} = \cos \theta + i \sin \theta - e^{3 + 2i} = e^3 \left( \cos 2 + i \sin 2 \right) = e^3 \cos 2 + e^3 i \sin 2
Teorema fondamentale dell’algebra
In \mathbb{C}, ogni equazione algebrica di grado n ha esattamente n soluzioni. (In altre parole, ogni polinomio di grado n ha esattamente n radici.)
Ruffini (sia reale che complesso)
Capitolo Due: Successioni
Una successione è una funzione definita in \N con valori in \R.
\begin{align*} f: \N &\to \R \\ n &\mapsto f(n) = a_n \end{align*}
La scrittura precisa e pignola è la seguente: \left\{ a_n \right\}_0^{+\infty} Esempi: - a_n = \frac{1}{n} \implies 1, \frac{1}{2}, \frac{1}{3}, \dots - b_n = s^n \implies 1, 2, 4, \dots - c_n = \left( -1 \right)^n \implies 1, -1, 1, \dots
2.1 Successioni monotone
Una successione è monotona crescente se a_n \leq a_{n+1} per ogni n \in \N. Per le monotone decrescenti, strettamente crescenti e strettamente decrescenti vale la stessa regola ma cambiando il ‘\leq’ con ‘\geq’, ‘<’ e ‘>’.
2.2 Successioni limitate
Legati alle successioni ci sono alcuni numeri notevoli: - \sup \left\{ a_n \right\}: il minimo dei maggioranti della successione - \inf \left\{ a_n \right\}: il massimo dei minoranti della successione - \max \left\{ a_n \right\}: il massimo della successione - \min \left\{ a_n \right\}: il minimo della successione
Si dice che a_n tende al limite l (quindo \lim_{n \to \infty} a_n = l) se
\forall \varepsilon > 0 \exists n_\varepsilon : n \geq n_\varepsilon, \left| a_n - l \right| < \varepsilon
In italiano: esite un numero arbitrariamente piccolo (\varepsilon) tale per cui, dopo un certo numero di elementi della successione, la differenza tra il limite e gli elementi della successione è minore di quel numero.
2.3 Definizione topologica di successione
Oltre alla definizione metrica (quella espressa qui sopra) esiste anche una definizione topologica equivalente:
\lim_{n \to \infty} a_n = L, \quad L \in \R \iff \forall \char"1D4B0 \left( L \right) \text{ definitivamente } a_n \in \char"1D4B0 \left( L \right)
In italiano: esite un intorno di L che contiene infiniti valori di a_n.
2.4 Regolarità di una successione
Una successione è regolare se ammette un limite finito o infinito. Una successione è irregolare se non ammette un limite. Ad esempio, la successione a_n = \frac{1}{n} è regolare mentre b_n = \sin n non lo è.
2.5 Teorema di monotonia
Se a_n è una successione monotona crescente e superiormente limitata allora ammette limite. Se a_n è una successione monotona decrescente e inferiormente limitata allora ammette limite.
Dimostrazione del primo punto (la dimostrazione del secondo è analoga)
Sia a_n una successione monotona crescente e superiormente limitata.
S = Sup \left \{ a_n \right \} \\ \forall \varepsilon > 0, \, a_{n^*} \in \left( S - \varepsilon, S \right] \\ \text{(Per ogni valore $\varepsilon$ arbitrariamente piccolo, ci sarà un certo $a_{n^*}$ che appartiene all'insieme che va da $S - \varepsilon$ a $S$)} \\ \forall n \ge n^* \quad S \ge a_n \ge a_{n^*} \implies \left( S - \varepsilon, S \right] \implies \left| S - a_n \right| < \varepsilon \\
2.6 Teorema di unicità del limite
Se a_n è una successione regolare allora ammette un solo limite.
Dimostrazione
Sia a_n una successione regolare.
a_n \to l_1 \quad \text{e} \quad a_n \to l_2 \\ \forall \varepsilon > 0, \, def. \left| a_n - l_1 \right| < \varepsilon \quad \text{e} \quad def. \left| a_n - l_2 \right| < \varepsilon \\
Allora
\left| l_2 - l_1 \right| > 0 \\ \left| l_1 - a_n + a_n - l_2 \right| \le \left| l_1 - a_n \right| + \left| a_n - l_2 | \right| < 2 \varepsilon \\
Di conseguenza l_1 e l_2 sono uguali.
2.7 Teorema di permaneza del segno
Data una successione a_n \to l: allora
- l > 0 \implies def. \, a_n > 0
- l < 0 \implies def. \, a_n < 0
- Idem con \ge e \le
Dimostrazione
\forall \varepsilon > 0, def. \, \left| a_n - l \right| < \varepsilon \implies l - \varepsilon < a_n < l +\varepsilon \implies a_n > l - \varepsilon > 0 \implies \text {Se $l < 0$ allora $a_n < 0$} \\
2.8 Teorema del confronto
Date tre successioni a_n, b_n e c_n tali che a_n < b_n < c_n allora se a_n \to l e c_n \to l allora anche b_n \to l.
Dimostrazione
\begin{align*} \forall \varepsilon > 0 \qquad & l - \varepsilon < a_n < l + \varepsilon \\ & l - \varepsilon < c_n < l + \varepsilon \\ \end{align*}
Siccome a_n < b_n < c_n allora anche l - \varepsilon < b_n < l + \varepsilon.
Corollario
- Se \left| b_n \right| \to 0 allora b_n \to 0.
- Se b_n è limitata e c_n \to 0 allora (b_n \times c_n) \to 0
2.9 Algebra dei limiti
Se a_n \to a e b_n \to b allora - a_n \pm b_n \to a \pm b - (a_n \times b_n) \to (a \times b) - \frac{a_n}{b_n} \to \frac{a}{b} \qquad \left( \text{Con } b \ne 0, b_n \ne 0\right) - a_n^{b_n} \to a^b \qquad \left( \text{Con } a > 0, a_n > 0\right)
Dimostrazione (limitatamente alla somma e al prodotto)
Somma
\left| \left( a_n + b_n \right) - \left( a + b \right) \right| = \left| a_n -a + b_n - b \right| \le \left|a_n - a \right| + \left| b_n - b \right| < 2 \varepsilon \qquad \text{La differenza tra la somma delle due successioni e la somma dei loro limiti è miserrima}
Prodotto
Devo dimostrare che la differenza tra $ a_n _n$ e a \times b è miserrima. Lo faccio aggiungendo e togliendo a \times b_n. Notare le priprietà del modulo.
\left| a_n \times b_n - a \times b \right| = \left| a_n \times b_n + a \times b_n - a \times b - a \times b_n \right| = \left| \left(a_n - a \right) \times b_n \right| + \left| a \times \left( b_n - b \right) \right| = \left| a_n - a \right| \times \left| b_n \right| + \left| a \right| \times \left| b_n - b \right| \le \varepsilon
2.10 Forme d’indecisione
A seconda della forma d’indecisione trovata, si può procedere in vari modi (il più adeguato dei quali varia da esercizio ad esercizio) Le forme d’indecisione sono: \infty - \infty, 0 \times \infty \frac{0}{0}, \frac{\infty}{\infty}, \infty^0, \infty^{\infty}, 1^\infty. Nel caso di queste ultime trè e sempre comoda la formula:
a^b = e ^ {\ln {a^b}} = e ^ {b \ln a}
Tutte le forme di indecisione sono riconducibili a 0 \times \infty.
2.11 Confrontare infiniti e infinitesimi
Confronto tra infiniti
\text{Se } x \to \infty: \log x < x ^ n < k^x < x! < x^x
Ordini di infinito
\text{Se } a_n \to \infty, b_n \to \infty \\ \lim \frac{a_n}{b_n} = \begin{cases} 0 & \text{Se $a_n$ è un infinito di ordine inferiore di $b_n$} \\ \ne 0 & \text{Se $a_n$ e $b_n$ sono infiniti dello stesso ordine} \\ \infty & \text{Se $a_n$ è un infinito di ordine superiore di $b_n$} \\ \nexists & \text{Se $a_n$ e $b_n$ non sono comparabili} \end{cases}
Un infinito di orine superiore va all’infinito di un infinito di ordine inferiore.
Ordini di infinitesimi
\text{Se } a_n \to 0, b_n \to 0 \\ \lim \frac{a_n}{b_n} = \begin{cases} 0 & \text{Se $a_n$ è un infinitesimo di ordine superiore a $b_n$} \\ \ne 0 & \text{Se $a_n$ e $b_n$ sono infiniti dello stesso ordine} \\ \infty & \text{Se $a_n$ è un infinito di ordine inferore a $b_n$} \\ \nexists & \text{Se $a_n$ e $b_n$ non sono comparabili} \end{cases}
Un infinitesimo di orduine superiore va a zero più velocemente di un infinitesimo di ordine inferiore.
Calcolare l’ordine di un infinito/infinitesimo
Per calcolare l’ordine di un infinito/infinitesimo è necessario calcolarne il limite del rapporto con un infinito/infinitesimo campione e ricondurre il risultato ad una forma simile a \frac{k}{n^\alpha}.
\alpha è l’ordine di infinito.
Di seguito una lista di infiniti e infinitesimi campioni:
| x \to 0 | x \to \pm \infty | x \to x_0 | |
|---|---|---|---|
| Infinitesimo campione: | x | \frac{1}{x} | x - x_0 |
| Infinito campione: | \frac{1}{x} | x | \frac{1}{x - x_0} |
Da notare che tra infinitesimo campione e infinito campione, sono uno il reciproco dell’altro. Gli infinitesimi campione tendono a 0 mentre gli infiniti campione tendono a infinito.
f(x) è un infinito di ordine \alpha se \exist \alpha : \lim_{x \to x^*} \frac{f(x)}{\left[ C(x) \right] ^ \alpha} = l \ne 0 dove C(x) è un infinito campione.
Questo èequivalente a dire che f(x) \sim \left[ C(x) \right] ^ \alpha
Asintotici notevoli
Sia \varepsilon_n una successione, allora
\begin{align*} \lim_{\varepsilon_n \to 0} \frac{\sin \varepsilon_n}{\varepsilon_n} = 1 &\implies \sin \varepsilon_n \sim \varepsilon_n \\ \lim_{\varepsilon_n \to 0} \frac{e^{\varepsilon_n} -1}{\varepsilon_n} = 1 &\implies e^{\varepsilon_n} -1 \sim \varepsilon_n \\ \lim_{\varepsilon_n \to 0} \frac{\left( 1 +\varepsilon_n \right)^\alpha - 1}{\varepsilon_n} = 1 &\implies \left( 1 + \varepsilon_n \right) - 1 \sim \alpha \varepsilon_n \\ \lim_{\varepsilon_n \to 0} \frac{1 - \cos \varepsilon_n}{\varepsilon_n^2} = \frac{1}{2} &\implies 1 - \cos \varepsilon_n \sim \frac{\varepsilon_n^2}{2} \\ \lim_{\varepsilon_n \to 0} \frac{\ln(1 +\varepsilon_n)}{\varepsilon_n} = 1 &\implies \ln(1 + \varepsilon_n) \sim \varepsilon_n \\ \lim_{\varepsilon_n \to 0} \frac{\tg \varepsilon_n}{\varepsilon_n} = 1 &\implies \tg \varepsilon_n \sim \varepsilon_n \\ \lim_{\varepsilon_n \to 0} \frac{\arctan \varepsilon_n}{\varepsilon_n} = 1 &\implies \arctan \varepsilon_n \sim \varepsilon_n \\ \lim_{\varepsilon_n \to 0} \frac{\sh \varepsilon_n}{\varepsilon_n} = 1 &\implies \sh \varepsilon_n \sim \varepsilon_n \\ \lim_{\varepsilon_n \to 0} \frac{\ch \varepsilon_n - 1}{\varepsilon_n^2} = 1 &\implies \ch \varepsilon_n - 1 \sim \frac{\varepsilon_n ^ 2}{2} \\ \end{align*}
\lim_{n \to \infty} \left( 1 + \frac{\alpha}{n} \right)^n = e^\alpha \\ n \to \infty \implies n! \sim n^n \times e^{-n} \times \sqrt{2 \pi n} \\
Capitolo Tre: Serie numeriche
Una serie numerica è una sommatoria dei termini di una successione:
S = \sum_{n=1}^\infty a_n
Il metodo più comune per trovarne un valore è quello di calcolare il limite di una sommatoria parziale:
S_k = \sum_{n=1}^k a_n \\ S = \lim_{k \to \infty} S_k
Le serie numeriche possono convergere (il loro valore è un numero finito), divergere (il loro valore è un numero infinito) è essere irregolari (Il loro valore oscilla). Questa loro caratteristica viene detta “carattere della serie”. La convergenza/divergenza di una serie può essere assoluta o semplice.
Le serie possono essere a termini positivi, a termini negativi o a termini alternati. Se una serie è a termini negativi, si raccoglie il meno e diventa una serie a termini positivi.
La prima cosa da fare, data una serie, è capire da quali tipi di termini è composta e successivamente capirne il carattere e dopo, se possibile capirne il valore.
Ci sono alcune serie più famose e comuni di altre.
3.1 Serie geometriche
Una serie geometrica è una serie della forma S = \sum_{n = k}^\infty q^n e il loro valore di convergenza/divergenza si calcola con la seguente formula:
S = \begin{cases} \frac{q^k}{1 - q} & \text{se } |q| < 1 & \text{(converge)} \\ + \infty & \text{se } q \ge 1 & \text{(diverge)} \\ \nexists & \text{se } q \le 1 & \text{(irregolare)} \\ \end{cases}
q si dice “ragione” della serie geometrica.
Dimostrazione del caso in cui converge
Nel caso in cui |q| < 1, si può dimostrare che la serie converge con la seguente formula:
\sum_{n = M}^\infty q^n = q^M + q^{M+1} + q^{M+2} + \dots = q^M \times \left( 1 + q^1 + q^2 + \dots \right) = q^M \times \sum_{n = 0}^{\infty} q^n = q^M \times \frac{1}{1 - q} = \frac{q^M}{1 - q}
L’equivalenza
\sum_{n = 0}^\infty q^n = \frac{q}{1 - q}
si può dimostrare nel seguente modo (e anche verificare per induzione):
\begin{align*} \sum_{k = 0}^n q^k = 1 + q + q^2 + q^3 + \dots + q^n &= \frac{\left( 1 + q + q^2 + q^3 + \dots + q^n \\ \right) \times \left( 1 - q \right)}{\left( 1 - q \right)} \\ &= \frac{\left( 1 - q + q - q^2 + q^2 - q^3 + q^3 - q^4 + \dots + q^n - q^{n+1} \right)}{1 - q} \\ &= \frac{1 - q^{n+1}}{1 - q} \end{align*}
e, impostando n = \infty,
\sum_{k = 0}^\infty q^k = \frac{1 - q^{\infty + 1}}{1 - q} = \frac{1}{1 - q}
3.2 Serie di Mengoli
La serie di Mengoli fa parte delle cosiddette serie telescopiche, che possono essere compresse in una differenza tra due termini (ma si vedrà dopo).
\sum_{n = 0}^\infty \frac{1}{n(n+1)} = \frac{1}{2} + \frac{1}{6} + \frac{1}{12} + \dots
La serie converge a 1, infatti:
S_k = \sum_{n = 1}^k \frac{1}{n(n+1)} = \sum_{n = 1}^k \left( \frac{1}{n} - \frac{1}{n+1} \right) = \left(1 - \frac{1}{2} \right) + \left(\frac{1}{2} - \frac{1}{3}\right) + \left(\frac{1}{3} - \frac{1}{4}\right) + \dots + \left(\frac{1}{k} - \frac{1}{k+1}\right) = 1 - \frac{1}{k+1} \\ S = \lim_{k \to \infty} S_k = 1 - \frac{1}{\infty} = 1 - 0 = 1
3.3 Serie armonica
Le serie armoniche sono le serie nella forma
S = \sum_{n = 1}^\infty \frac{1}{n^\alpha} = \begin{cases} \text{converge} & \text{se } \alpha > 1 \\ \text{diverge} & \text{se } \alpha \le 1 \\ \end{cases}
Nota: se \alpha = 1 allora è un caso particolare della serie geometrica.
3.4 Teorema di Cauchy (Teorema della condizione necessaria)
Se \sum a_n converge allora a_n \to 0
(Da cui possiamo ricavare che se a_n \not \to 0 allora la serie non converge)
Dimostrazione
Supponiamo esista finito il \lim S_k = S (quindi che la serie converga ad S). Allora
S_{k+1} - S_k = \sum_{n = 0}^{k + 1} a_n - \sum_{n = 0}^k a_n = a_{k+1} \\
quindi
\lim_{k \to \infty} a_{k+1} = \lim_{k \to \infty} \left( S_{k+1} - S_k \right) = S - S = 0
Perchè il viceversa non è vero???
Si pensi a a_n = \frac{1}{n}: a_n \to 0 ma \sum a_n diverge.
3.5 Come risolvere le serie a termini positivi (e, di conseguenza, anche quelle a termini negativi)
Ci sono vari criteri a cui affidarsi per capire se una serie converge o diverge.
Criterio del confronto asintotico
Data una serie \sum a_n, se si riesce a ricondurre a_n alla forma a_n \sim d\frac{k}{n^\alpha \times [\ln n]^\beta}
allora
\begin{cases} \text{converge} & \text{se } \alpha > 1 \\ \text{converge} & \text{se } \alpha = 1 \text{ e } \beta > 1 \\ \text{diverge} & \text{altrimenti} \end{cases}
Criterio del confronto
Data una serie \sum b_n, e altre due serie a_n e c_n tali che a_n < b_n < c_n allora: 1. Se c_n converge anche b_n converge 2. Se a_n diverge anche b_n diverge
Criterio del rapporto
Data una serie \sum a_n allora si calcola
\lim_{n \to \infty} \sqrt[n]{a_n} = \begin{cases} > 1 & \text{diverge} \\ < 1 & \text{converge} \\ = 1 & \text{non si sa} \end{cases}
Dimostrazione
Se \sqrt[n]{a_n} \to l < 1 allora
\left( a_n \right) ^ {\frac{1}{n}} \to l < 1 \\ a_n \to l^n \\ a_n \to \left( \frac{1}{l^{-1}} \right)^n \le \frac{1}{n^2} \text{ (che converge)} \\ \implies \sum a_n < \sum \frac{1}{n^2} \text{ e quindi converge}
Criterio del rapporto
Data una serie \sum a_n allora si calcola
\lim_{n \to \infty} \frac{a_{n+1}{a_n}} = \begin{cases} > 1 & \text{diverge} \\ < 1 & \text{converge} \\ = 1 & \text{non si sa} \end{cases}
Dimostrazione
Ricapitolando, se l < 1$ allora la serie diverge, altrimenti se \frac{a_{n+1}}{a_n} \to l < 1 converge. In questo secondo caso,
\exists \bar n : \forall n > \bar n \quad a_{n+1} < (l - \varepsilon) \\ \text{Chiamo } k = (l - \varepsilon) < 1 \text{ quindi} \\ a_{\bar n + 1} < ka_{\bar n} \text{ e } a_{\bar n + 2} < k^2a_{\bar n} \text{ e così via} \dots \\
Di conseguenza posso riscrivere la sommatoria:
\sum a_n = \sum_{n = 0}^{\bar n - 1} a_n + \sum_{n = \bar n}^{\infty} a_n
Notare che la prima sommatoria è finita, pertanto è trascurabile, abbiamo quindi che
\sum a_n = \sum_{n = \bar n}{\infty} a_n = \sum_{m = 0}^{\infty} k^ma_{\bar n} = a_{\bar n} \times \sum_{m = 0}^{\infty} k^m
Siccome m > 1, la serie converge per il criterio del confronto.
Capitolo Quattro: Funzioni
Una funzione è una relazione tra gli elementi di due insiemi, chiamati dominio e codominio. Una funzione defe essere definita per ciascun elemento del dominio.
4.1 Iniettività e suriettività
Una funzione è iniettiva se a diversi elementi del codominio corrispondono diversi elementi del dominio:
f: D \to C \\ f(x) \ne f(y) \implies x \ne y
Una funzione è suriettiva se a ciascuno degli elementi del codominio corrisponde un elemento del dominio:
\exists x \in D : f(x) = y \qquad \forall y \in C
4.2 Simmetria
Una funzione è pari se f(x) = f(-x). Una funzione è dispari se f(x) = -f(-x). Requisito necessario perchè una funzione sia pai o dispari è che il dominio debba essere simmetrico. Ciascuna funzione polinomio può essere scritto come somma di una funzione pari e di una dispari. Somma, prodotto, differenza e rapporto tra funzioni pari daranno funzioni pari. Somma e differenza tra funzioni dispari daranno funzioni dispari. Prodotto e rapporto tra funzioni dispari daranno funzioni pari. Prodotto e rapporto tra funzioni pari e dispari daranno funzioni dispari.
4.3 Limitatezza e monotonia
Come le successioni, anche le funzioni possono essere monotone e limitate. Monotonia di successioni e limitatezza di successioni.
4.4 Invertibilità di funzioni
Per essere invertibile, una funzione deve essere sia suriettiva che iniettiva (quindi monotona). In particolare, ad ogni x deve corrispondere un solo y e viceversa; in caso questo non sia possibile, si attua una restrizione del dominio. Ad esempio, dato f : \R \to \R tale che f(x) = x^2, f non sarebbe invertibile perchè f(1) = f(-1) ma se restringiamo il dominio ai soli numero positivi allora si. Di seguito esempio di inversione della funzione \sh:
\sh x = \frac{e^x - e^{-x}}{2} \\
\begin{align*} y = \frac{e^x - e^{-x}}{2} &\implies x = \frac{e^y - e^{-y}}{2} \\ \end{align*} \\
\begin{align*} &\implies 2x = \frac{e^{2y}-1}{e^y} \\ \end{align*} \\
\begin{align*} &\implies 2xe^y = e^{2y}-1 \\ \end{align*} \\
\begin{align*} &\implies (e^y)^2 - 2x \times e^y - 1 = 0 \\ \end{align*} \\
\begin{align*} e^y = \frac{-2x \pm \sqrt{4x^2 + 4}}{2} &\implies e^y = \frac{-2x \pm 2\sqrt{x^2 + 1}}{2} \\ \end{align*} \\
\begin{align*} &\implies e^y = -x \pm \sqrt{x^2 + 1} \\ \end{align*} \\
\begin{align*} &\implies y = \ln \left( -x + \sqrt{x^2 + 1} \right) \end{align*} \\
\text{Il $-$ non lo si può utilizzare perchè $e^x$ è sempre positiva ma col $-$ si arriverebbe ad un risultato negativo} \\
Di seguito le principali funzioni e le loro inverse:
| Funzione | Inversa |
|---|---|
| f(x) = x^2 | f^{-1}(x) = \sqrt{x} |
| f(x) = x^3 | f^{-1}(x) = \sqrt[3]{x} |
| f(x) = \sqrt{x} | f^{-1}(x) = x^2 |
| f(x) = \sqrt[3]{x} | f^{-1}(x) = x^3 |
| f(x) = \ln x | f^{-1}(x) = e^x |
| f(x) = \log_{10} x | f^{-1}(x) = 10^x |
| f(x) = \log_{a} x | f^{-1}(x) = a^x |
| f(x) = \sin x | f^{-1}(x) = \arcsin x |
| f(x) = \cos x | f^{-1}(x) = \arccos x |
| f(x) = \tan x | f^{-1}(x) = \arctan x |
| f(x) = \sh x | f^{-1}(x) = \ln \left( x + \sqrt{x^2 + 1} \right) |
| f(x) = \ch x | f^{-1}(x) = \ln \left( x + \sqrt{x^2 - 1} \right) (con restrizione dominio) |
Teorema di invertibilità di funzioni
Se f è strettamente monotona allora f è invertibile e la funzione inversa è monotona.
4.5 Funzioni periodiche
Una funzione f è periodica con periodo t se f(x) = f(x + t) per ogni x.
Operazioni sul grafico di funzioni
y = f(x) + k \qquad \begin{cases} k = 0 & \qquad \text{Non succede niente} \\ k > 0 & \qquad \text{Il grafico si sposta verso l'alto} \\ k < 0 & \qquad \text{Il grafico si sposta verso il basso} \end{cases}
y = f(x + k) \qquad \begin{cases} k = 0 & \qquad \text{Non succede niente} \\ k > 0 & \qquad \text{Il grafico si sposta verso destra} \\ k < 0 & \qquad \text{Il grafico si sposta verso sinistra} \\ \end{cases}
y = \alpha f(x) \qquad \begin{cases} \alpha = 0 & \qquad \text {Il grafico diventa $y=0$} \\ \alpha = 1 & \qquad \text {Non succede niente} \\ \alpha = -1 & \qquad \text{Il grafico si ribalta rispetto all'asse x} \\ \alpha > 1 & \qquad \text{Il grafico si dilata verticalmente} \\ 0 < \alpha < 1 & \qquad \text{Il grafico si stringe verticalmente} \\ -1 < \alpha < 0 & \qquad \text{Il grafico si stringe verticalmente e si ribalta rispetto all'asse x} \\ \alpha < -1 & \qquad \text{Il grafico si dilata verticalmente e si ribalta rispetto all'asse x} \\ \end{cases}
y = f(\beta x) \qquad \begin{cases} \beta = 0 & \qquad \text {Il grafico diventa $y = f(0)$} \\ \beta = 1 & \qquad \text {Non succede niente} \\ \beta = -1 & \qquad \text{Il grafico si ribalta rispetto all'asse y} \\ \beta > 1 & \qquad \text{Il grafico si restringe orizzontalmente} \\ 0 < \beta < 1 & \qquad \text{Il grafico si dilata orizzontalmente} \\ -1 < \beta < 0 & \qquad \text{Il grafico si dilata orizzontalmente e si ribalta rispetto all'asse y} \\ \beta < -1 & \qquad \text{Il grafico si restringe orizzontalmente e si ribalta rispetto all'asse y} \\ \end{cases}
y = \left| f(x) \right| \qquad \text{Il grafico nel III° e IV° quadrante viene ribaltato e sorvapposto a quanto presente nel II° e I° quadrante; III° e IV° sono vuoti}
y = f\left( \left| x \right| \right) \qquad \text{Il grafico di I° e IV° viene riflesso e sostituisce quanto presente nel II° e III° quadrante; la funzione diventa pari}
4.6 Limiti di funzioni
I limiti delle funzioni sono molto simili ai lititi per le successioni: asintotici, teoremi e proprietà varie che valgono sia per le successioni valgono anche per le funzioni. Di seguito le definizioni di limite di una funzione.
Definizione metrica
\lim_{x \to \infty} f(x) = l \iff \forall \varepsilon > 0 \quad def. \left| l - f(x) \right| < \varepsilon
Definizione topologica
Dati x^* \in \overline \R e L \in \overline \R, se f(x) è definita in \char"1D4B0 (x^*) salvo al più in x^* allora
\lim_{x \to x^*} f(x) = L
se
\forall \char"1D4B0 (L) \quad \exists \char"1D4B0(x^*) : x \in \char"1D4B0(x^*) \implies f(x) \in \char"1D4B0(L)
In italiano, il limite a x^* di una funzione è L se per ogni x intorno ad x^*, f(x) è intorno a L.
Definizione successionale
\lim_{x \to x^*} = L \text{ se } \forall \left\{ x_n \right\}, x_n \to x^* \text{ e } x_n \ne x^* \, \forall n
quindi se ho \left\{ f(x_n) \right\} allora f(x_n) \to L.
Inoltre
\begin{align*} \lim f(x) = l^+ & \implies f(x) \to l \text{ e } f(x) \ge l \\ \lim f(x) = l^- & \implies f(x) \to l \text{ e } f(x) \le l \\ \lim_{x \to x_0^-} f(x) = l & \implies \text{Se } x < x_0 \text{ allora } f(x) \to l \\ \lim_{x \to x_0^+} f(x) = l & \implies \text{Se } x > x_0 \text{ allora } f(x) \to l \\ \end{align*}
Altri teoriemi riciclabili dalle successioni
Teorema di permanenza del segno
\lim_{x \to x^*} f(x) \implies \begin{cases} \text{Se } L > 0 \implies \exists \char"1D4B0(x^*) \text{ dove } f(x) > 0 \\ \text{Se } L < 0 \implies \exists \char"1D4B0(x^*) \text{ dove } f(x) < 0 \end{cases}
Valido anche per \ge e \le
Teorema del confronto
Se
\exists \char"1D4B0(x^*) : f(x) \le g(x) \le h(x) e \lim_{x \to x^*} f(x) = \lim_{x \to x^*} h(x) = L
allora
\lim_{x \to x^*} g(x) = L
Corollario
Dato h(x) \to 0 con x \to x^* allora - \exists \char"1D4B0(x^*) : \left| g(x) \right| \le h(x) \implies g(x) \to 0 - \exists \char"1D4B0(x^*) : g(x) \text{ è limitata } \implies g(x) \times h(x) \to 0
4.7 Continuità di funzioni
Dato un intervallo (a, b) con x_0 \in (a, b) allora
f : (a, b) \to \R \quad \text{ è continua in $x_0$ se } \lim_{x \to x_0} f(x) = f(x_0)
Se f \in \mathcal{C}(D) si dice che f appartiene all’insieme delle funzioni continue in ogni punto del dominio D.
Tutte le funzioni elementari, trigonometriche e iperboliche sono continue nel loro dominio (anche \sqrt{x} e \frac{1}{x} infatti non sono definite per tutto \R ma dove lo sono, sono continue).
Teorema
Se f è continua in (a, b) ed è monotona allora
\forall c \in (a, b) \exists \lim_{x \to c^+} f(x) = \lim_{x \to c^-} f(x)
Teorema (quello che permette di fare il cambio di base)
Se f è continua in x_0 e f(x_0) > 0 allora \exists \char"1D4B0(x_0) : f > 0.
Teorema
Se
\lim_{x \to x_0} f(x) = t_0 \in \overline \R \\ \lim_{t \to t_0} g(t) = l \in \overline \R \\ f(x) \ne t_0 \quad \forall x \in \char"1D4B0(x_0) \\
allora
\lim_{x \to x_0} g(f(x)) = l
In altre parole, se t_n = f(x_n) e \forall t_n, \, g(t_n) \to l allora \forall x_n, \, g(f(x_n)) \to l
Teorema
Se
\lim_{x \to x_0} f(x) = f(x_0) \\ \lim_{x \to t_0} g(t) = g(t_0) \\ t_0 = f(x_0)
allora
\lim_{x \to x_0} g(f(x)) = g(f(x_0))
quindi g \cdot f è continua in x_0.
Teorema degli zeri (importante)
Se
f \in \mathcal{C}[a, b] \\ f(a) \times f(b) < 0
allora
\exists x^* \in [a, b] : f(x^*) = 0
Dimostrazione costruttiva
Se a_0 = a e b_0 = b allora
- Calclolo c_n = \frac{a_n + b_n}{2}
- Se f(c_n) = 0 allora c_n è la soluzione, altrimenti
- Se f(a_n) \times f(c_n) > 0 e f(b_n) \times f(c_n) < 0 allora a_{n+1} = c_n, b_{n+1} = b_n
- Altrimenti se f(a_n) \times f(c_n) < 0 e f(b_n) \times f(c_n)> 0 allora a_{n+1} = a_n, b_{n+1} = c_n
- Riparto dal punto 1.
Dopo infiniti passaggi, si arriverà alla soluzione. a_n è una successione che si avvicina da sinistra al punto x^* e b_n è una successione che si avvicina da destra al punto x^* (sono successioni monotone e limitate). Da questo si può verificare che x^* è unico: a = b quindi a - b \to l = 0
Se x_n \to x allora f(x_n) \to f(x), infatti f(a_n) \times f(b_n) < 0 \implies f(a_n) \times f(b_n) \to f(\lim a_n) \times f(\lim b_n) = [f(l)]^2. Per il teorema di permanenza del segno, [f(l)]^2 \le 0 ma [f(l)]^2 è un quadrato per cui [f(l)]^2 \ge 0, di conseguenza [f(l)]^2 = 0 e quindi f(l) = 0.
Teorema di Weiersstrass
Se f \in \mathcal{C}(D) con D chiuso e limitato (quindi senza infiniti) allora \exists x_1, x_2 \in D : f(x_1) \ge f(x) \ge f(x_2) \quad \forall x \in D.
In italiano, la funzione ammette un massimo e un minimo: l’idea è come quella del teorema degli zeri, continuando a dividere a metà, si arriverà per forza ad un massimo e ad un minimo.
Il teorema di Weierstrass è una condizione sufficiente ma non necessaria: se le ipotesi sono verificate allora è vera la tesi ma non è detto che sia vero che se la tesi è vera allora le ipotesi sono verificate. Per esempio, nella funzione f(x) = xe^{-x^2}, se x \to 0 allora f(x) \sim x e se x \to \pm \infty allora f(x) \to 0. I massimi e i minimi esistono anche se il dominio (\R) non è ne chiuso ne limitato.
Perchè le condizioni nell’ipotesi sono necessarie?
- f : [0, 1] \to \R \qquad f(x) = \begin{cases} x & 0 < x < 1 \\ \frac{1}{2} & x = 0, x = 1 \end{cases} Non è continua. f non può avere un massimo (1) perchè non esiste una x tale che f(x) = 1.
- f : (-\frac{\pi}{2}, \frac{\pi}{2}) \to \R \qquad f(x) = \tg x è continua in D ma D è aperto pertanto f non è definita nei punti nei quali avrebbe valore massimo: \pm \frac{\pi}{2} \not \in (-\frac{\pi}{2}, \frac{\pi}{2})
- f : [0, +\infty) \to \R \qquad f(x) = \sqrt{x} è continua in D ma D è chiuso ma non limitato: \min(f) = 0 ma \max(f) = \nexists (dovrebbe essere \infty)
Teorema di Darboux (teorema dei valori intermedi)
Se f \in \mathcal{C}[a, b] e \exist m = \underset{[a, b]}{\min}(f), \, M = \underset{[a, b]}{\max}(f) (quindi se il teorema di Weierstrass è verificato) allora
\forall \lambda \in (m, M) \exist x^* \in [a, b] : f(x^*) = \lambda
In italiano, se una funzione è continua in un dato intervallo, allora assumerà tutti i possibili valori compresi tra il suo massimo e minimo in quell’intervallo.
Dimostrazione
Se x_1, x_2 sono i punti in cui la funzione f assume i valori di minimo e massimo (per il contrario, la dimostrazione è analoga) allora poniamo
g(x) = f(x) - \lambda \\ m = f(x_1) \\ M = f(x_2) \\ I = [x_1, x_2] \subseteq [a, b]
da cui concludiamo che:
- g \in \mathcal{C}[a, b] \implies g \in \mathcal{C}(I)
- g(x_1) \times g(x_2) < 0 infatti, se f(x_1) > \lambda allora f(x_2) < \lambda e viceversa, per cui g(x_1) e g(x_2) sono di segni opposti. In questo caso, f(x_1) = m < \lambda \implies m - \lambda < 0 \implies g(x_1) < 0 e quindi g(x_2) > 0
- e 2. soddisfano le ipotesi del teorema degli zeri, quindi \exists x^* \in I : g(x^*) = 0 \implies f(x) = \lambda
Teorema
Se I è un intervallo qualsiasi e f \in \mathcal{C}(I) allora f è invertibile \iff f è strettamente monotona.
Dimostrazione
- \lArr: Se f è strettamente monotona allora è invertibile per precedente (insert link here) dimostrazione che verrà di seguito riportata. \forall x_1, x_2 \in D : x_1 > x_2 \implies \begin{cases} f(x_1) > f(x_2) & \quad \text{Se strettamente crescente} \\ f(x_1) < f(x_2) & \quad \text{Se strettamente decrescente} \end{cases} Da qui deduciamo che \forall x_1, x_2 \in D : x_1 \ne x_2 \implies f(x_1) \ne f(x_2) per cui la funzione è iiettiva e di conseguenza invertibile se si presta attenzione al fatto che dominio e codominio si scambiano.
- \rArr: A \rArr B allora \overline B \rArr \overline A quindi “Se f è invertibile allora è monotona” diventa “Se f non è monotona allora non è invertibile” Quindi se f non è monotona e x_1 < x_2 < x_3 allora f(x_1) < f(x_2) > f(x_3) (oppure f(x_1) > f(x_2) < f(x_3), la dimostrazione è analoga). Suppongo che f(x_1) < f(x_3) (il seguente ragionamento è analogo per il contrario): per il teorema di Darboux, \exists x^* \in [x_1, x_2] : f(x^*) = f(x_3) \implies f non è iniettiva e pertanto neanche invertibile.
Corollario
- Se f \in \mathcal{C}(I) è invertibile allora g = f^{-1} \in \mathcal{C}(\text{Im} f)
- Se g non fosse continua, non lo sarebbe neanche f
Infiniti e infinitesimi
Funzionano esattamente come con le successioni
4.8 Asintotici
Asintoto verticale
Se
\lim_{x \to x_0} f(x) = \pm \infty \text{ oppure } \lim_{x \to x_0^\pm} f(x) = \pm \infty
allora ad x = x_0 c’è un asintoto verticale.
Asintoto orizzontale
Se
\lim_{x \to \pm \infty} f(x) = l
allora ad y = l c’è un asintoto orizzontale
Asintoto obliquo
Se
\lim_{x \to \pm \infty} f(x) = \pm \infty \\ \lim_{x \to \pm \infty} \frac{f(x)}{x} = l \ne 0, \ne \pm \infty \\ \lim_{x \to \pm \infty} f(x) - mx = q \ne \pm \infty
allora l’asintoto obliquo esiste ed è y = mx + q. Con x \to \infty, f(x) \sim mx
4.9 o-piccoli e algebra degli stessi
o(\square) = qualcosa di trascurabile rispetto a \square. Per x \to x^*, f(x) \sim g(x) \iff f(x) = g(x) + o(g(x)) Per x \to 0 se f(x) = o(x^\alpha) allora
\lim_{x \to 0} \frac{f(x)}{x^\alpha} = 0
Se f(x) è un infinito allora f(x) = o(f(x^2)) Se f(x) è un infinitesimo allora f(x^2) = o(f(x))
Algebra degli o piccoli
o(x^\alpha) = o(kx^\alpha) = ho(x^\alpha) \\ o(x^\alpha) \text{ va a zero più velocemente di } x^\alpha \\ o(x^\alpha) \pm o(x^\alpha) = o(x^\alpha) \\ x^\beta \times o(x^\alpha) = o(x^\alpha) \times o(x^\beta) = o(x^{\alpha + \beta})
Se \beta > \alpha allora
o(x^\alpha) \pm o(x^\beta) = o(x^\alpha) \\ o(x^\alpha) \pm ax^\beta = o(x^\alpha) \\
4.10 Parte principale di un infinito/esimo
La parte principale di un infinito/esimo si calcola al limite indicato ed è nella forma k(x - x_0)^\alpha
Come calcolarla
Data una f(x) e x \to x_0, calcolo
\lim_{x \to x_0} \frac{f(x)}{(x - x_0)^\alpha} = \lim_{x \to x_0} \frac{k(x - x_0)^n}{(x - x_0)^\alpha} = k(x - x_0)^{n - \alpha}
Pongo \alpha = n (e ho trovato \alpha) poi sostituisco
k(x - x_0)^{n - \alpha} = k(x - x_0)^0 = k
e ho trovato anche k.
Ora scrivo il tutto nella forma K(x - x_0)^\alpha e ho finito
Esercizio d’esempio
f(x) = \ln x - \ln 2 con x \to 2
\begin{align*} \lim_{x \to 2} \frac{\ln x - \ln 2}{(x - 2)^\alpha} &= \lim_{x \to 2} \frac{\ln \frac{x}{2}} {(x - 2)^\alpha} \\ &= \lim_{x \to 2} \frac{\ln \left( 1 + \frac{x}{2} - 1\right)}{(x - 2)^\alpha} \\ &\sim \lim_{x \to 2} \frac{\frac{x}{2} - 1}{(x - 2)^\alpha} \\ &= \lim_{x \to 2} \frac{1}{2} \times (x - 2)^{1 - \alpha} \implies \alpha = 1,\, k = \frac{1}{2} \end{align*}
Capitolo Cinque: Glossario formule trigonometriche
5.1 Seno, coseno, tangente
\sin x = -\sin -x \\ \cos x = \cos -x \\ \tan x = -\tan -x = \frac{\sin x}{\cos x} \\ \left[ \tan x \right]^{-1} = \arctan x \\
5.2 Funzioni iperboliche
\sh x = \frac{e^x - e^{-x}}{2} \\ \ch x = \frac{e^x + e^{-x}}{2} \\
5.3 Seno e coseno di x mezzi
Il segno va deciso in base al quadrante di partenza e di arrivo.
\cos \frac{x}{2} = \pm \sqrt{\frac{1 + \cos x}{2}} \\ \sin \frac{x}{2} = \pm \sqrt{\frac{1 - \cos x}{2}} \\
5.4 Seno e coseno di somme di angoli
Conoscendo la prima di ogni coppia di formule, ci si può ricavare la seconda.
\sin (a + b) = \sin a \cos b + \cos a \sin b \\ \sin (a - b) = \sin a \cos b - \cos a \sin b \\ \cos (a + b) = \cos a \cos b - \sin a \sin b \\ \cos (a - b) = \cos a \cos b + \sin a \sin b \\ \tan (a + b) = \frac{\tan a + \tan b}{1 - \tan a \tan b} \\
5.5 Angoli famosi
| Angolo (rad) | Angolo (°) | Seno | Coseno | Tangente |
|---|---|---|---|---|
| 0 | 0 | 0 | 1 | 0 |
| π/6 | 30 | 1/2 | √3/2 | 1/√3 |
| π/4 | 45 | √2/2 | √2/2 | 1 |
| π/3 | 60 | √3/2 | 1/2 | √3 |
| π/2 | 90 | 1 | 0 | &infin |
5.6 Cambio dei parametri
\sin (\alpha + \pi) = -\sin \alpha \\ \cos (\alpha + \pi) = -\cos \alpha \\ \tan (\alpha + \pi) = \tan \alpha \\ \sin (\alpha + \frac{\pi}{2}) = \cos \alpha \\
Capitolo Sei: Calcolo Differenziale
6.1 Definizione di derivata
Data f : (a, b) \to \mathbb{R} e x_0 \in (a, b), f si dice derivabile in x_0 se
\exists \text{ finito } f'(x_0) = \lim_{h \to 0} {\frac{f(x_0+h) - f(x_0)}{h}}
f'(x) associa ad ogni x la derivata di f nel punto x ovvero il coefficente angolare della retta tangente a f(x) nel punto x.
\frac{f(x_0 + h) - f(x_0)}{h} è detto rapporto incrementale
6.2 Caratterizzazione dei punti di non derivabilità
Ci sono 3 tipi di punti di non derivabilità: il Punto angoloso, il Flesso a tangente verticale e la Cuspide.
Per trovarli, è necessario calcolare i seguenti rapporti incrementali:
f'_+(x_0) = \lim_{x \to 0^+} {\frac{f(x_0 + h) - f(x_0)}{h}} \\ f'_-(x_0) = \lim_{x \to 0_-} {\frac{f(x_0 + h) - f(x_0)}{h}}
Se f'_+(x_0) = f'_-(x_0) allora la funzione è derivabile in x_0 altrimenti x_0 è detto punto di non derivabilità.
- Punto angoloso: f'_+(x_0) \ne f'_-(x_0) ed entrambi esistono finiti. Ad esempio, se f(x) = |x| e x_0 = 0 allora f'_+(x_0) = 1 \ne f'_-(x_0) = -1
- Flesso a tangente verticale: f'(x_0) = \pm \infty Ad esempio, se f(x) = \sqrt[3]{x} e x_0 = 0 allora f'(x_0) = +\infty
- Cuspide: f'_+(x_0) = \pm \infty \ne f'_-(x_0) = \pm \infty Ad esempio, se f(x) = \sqrt[3]{x^2} e x_0 = 0 allora f'_+(x_0) = +\infty \ne f'_-(x_0) = -\infty
6.3 Relazione tra derivabilità e continuità
Se f : (a, b) \to \mathbb{R} e x_0 \in (a, b), se f è derivabile in x_0 allora f è anche continua in x_0.
Dimostrazione
Se f è continua in x_0 allora:
\lim_{x \to x_0} {f(x)} = f(x_0) = \lim_{x \to x_0} \left[f(x) - f(x_0) \right] \implies \lim_{h \to 0} \left[ f(x_0 + h) - f(x_0) \right] = 0
Se f è derivabile allora:
\lim_{h \to 0} {\frac{f(x_0 + h) - f(x_0)}{h}} = f'(x_0)
Riscrivendo, f(x_0 + h) - f(x_0) = f'(x_0) \cdot h + \small{o}(h) e
\lim_{h \to 0} [f(x_0 + h) - f(x_0)] = \lim_{h \to 0} [f'(x_0) \cdot h + \small{o}(h)] = 0
6.4 Regole di derivazione
Per evitare di calcolare sempre il rapporto incrementale, esistono delle forme generiche che possono essere riciclate per derivare velocemente quasi tutto.
| Funzione | Derivata |
|---|---|
| k | 0 (*1) |
| x^\alpha | \alpha x ^{\alpha - 1} (*2) |
| e^x | e^x (*3) |
| \sin x | \cos x (*4) |
Seguono dimostrazioni e note.
(*1):
\lim_{h \to 0} \frac{f(x_0 + h) - f(x_0)}{h} = \lim_{h \to 0} \frac{k - k}{h} = 0
(La forma di indecisione non c’è in questo caso perchè la frazione è “sicuramente zero”/“molto vicino a zero”)
(*2): Se x_0 = 0 e \alpha > 0 allora il limite del rapporto incrementale è pari al limite di h^{\alpha - 1} che diverge per \alpha < 1.
\lim_{h \to 0} \frac{f(x_0 + h) - f(x_0)}{h} = \lim_{h \to 0} \frac{(x_0 + h) ^ \alpha - x_0^\alpha}{h} = x_0^\alpha \cdot \lim_{h \to 0} \frac{(1 + \frac{h}{x_0}) ^ \alpha - 1}{h} = x_0^\alpha \cdot \lim_{h \to 0} \frac{\alpha \cdot \frac{\cancel{h}}{x_0}}{\cancel{h}} = \alpha \cdot \frac{x_0^\alpha}{x_0} = \alpha \cdot x_0^{\alpha - 1}
(3*): e è quel numero che sappiamo esistere solo grazie al teorema di monotonia
\lim_{h \to 0} \frac{f(x_0 + h) - f(x_0)}{h} = \lim_{h \to 0} \frac{e^{x_0} \cdot e^h - e^{x_0}}{h} = e^{x_0} \cdot \lim_{h \to 0} \frac{e^h - 1}{h} = e^{x_0}
(4*):
\begin{align*} \lim_{h \to 0} \frac{\sin(x_0 + h) - \sin(x_0)}{h} &= \lim_{h \to 0} \frac{\sin x_0 \cdot \cos h + \cos x_0 \cdot \sin h - \sin x_0}{h} \\ &= \lim_{h \to 0} \left[ \sin x_0 \cdot \left( \frac{\cos h - 1}{h} \right) + cos x_0 \cdot \left( \frac{\sin h}{h} \right) \right] \\ &= \lim_{h \to 0} \left[ \sin x_0 \cdot \left( -\frac{h^2}{2} \cdot \frac{1}{h} \right) + \cos x_0 \cdot \left( \frac{h}{h} \right) \right] \\ &= \sin x_0 \cdot 0 + \cos x_0 \cdot 1 \\ &= \cos x_0 \end{align*}
Il fatto che \lim_{x \to 0} \frac{\sin x}{x} = 1 si può dimostrare con l’Hopital che però richiede che sia dimostrato che [\sin x]' = \cos x, ma quest’ultimo fatto si può dimostrare con il fatto che \lim_{x \to 0} \frac{\sin x}{x} = 1 quindi serve la dimostrazione senza derivate (quella della “torta”) per evitare di cadere nella definizione circolare e autoreferenziale (“l’Hopital ha ragione perchè [\sin x]' = \cos x ma [\sin x]' = \cos x è vero perchè l’Hopital ha ragione”).
6.5 Derivate elementari ma più in particolare
| Funzione | Derivata |
|---|---|
| k | 0 |
| \square^\alpha | \alpha \square^{\alpha - 1} \cdot \square' |
| e^\square | e^\square \cdot \square' |
| a^\square | a^\square \cdot \ln a \cdot \square' |
| \ln \square | \frac{1}{\square} \cdot \square' |
| \log_n \square | \frac{1}{\square \cdot \ln n} \times \square' |
| \sin \square | \cos \square \cdot \square' |
| \cos \square | -\sin \square \cdot \square' |
| \tan \square | \frac{1}{\cos^2 \square} \cdot \square' |
| \arcsin \square | \frac{1}{\sqrt{1 - \square^2}} \cdot \square' |
| \arccos \square | \frac{-1}{\sqrt(1 - \square^2)} \cdot \square' |
| \arctan \square | \frac{1}{1 + \square^2} \cdot \square' |
| \sinh \square | \cosh \square \cdot \square' |
| \cosh \square | \sinh \square \cdot \square' |
| \tanh \square | \frac{1}{\cosh \square} \cdot \square' |
6.6 Algebra delle derivate
Siano f, g : (a, b) \to \mathbb{R}, x_0 \in (a, b) e f, g derivabili in x_0, allora:
- [f \pm g]'(x_0) = f'(x_0) \pm g'(x_0)
- [f \times g]'(x_0) = [f' \times g](x_0) + [f \times g'](x_0)
- \left[ \frac{f}{g} \right]'(x_0) = \frac{[f' \times g](x_0) - [f \times g'](x_0)}{[g(x_0)]^2}
Dimostrazioni
- Somma
\begin{align*} \lim_{h \to 0} \frac{[f + g](x_0 + h) - [f + g](x_0)}{h} &= \lim_{h \to 0} \left[ \frac{1}{h} \cdot [f(x_0+h) + g(x_0 + h) - f(x_0) - g(x_0)] \right] \\ &= \lim_{h \to 0} \left[ \frac{1}{h} \cdot [f(x_0 + h) - f(x_0) + g(x_0 + h) - g(x_0)] \right] \\ &= \lim_{h \to 0} \left[ \frac{f(x_0 + h) - f(x_0)}{h} + \frac{g(x_0 + h) - g(x_0)}{h} \right] \\ &= \lim_{h \to 0} \frac{f(x_0 + h) - f(x_0)}{h} + \lim_{h \to 0} \frac{g(x_0 + h) - g(x_0)}{h} \\ &= f'(x_0) + g'(x_0) \end{align*}
La dimostrazione è analoga per la differenza.
- Prodotto
\begin{align*} \lim_{h \to 0} \frac{f(x_0 + h) \cdot g(x_0 + h) - f(x_0) \cdot g(x_0)}{h} &= \lim_{h \to 0} \frac{f(x_0 + h) \cdot g(x_0 + h) - f(x_0) \cdot g(x_0 + h) + f(x_0) \cdot g(x_0 + h) - f(x_0) \cdot g(x_0)}{h} \\ &= \lim_{h \to 0} \left[ \frac{f(x_0 + h) - f(x_0)}{h} \cdot g(x_0 + h) \right] + \lim_{h \to 0} \left[ f(x_0) \cdot \frac{g(x_0 + h) - g(x_0)}{h} \right] \\ &= f'(x_0) \cdot g(x_0) + f(x_0) \cdot g'(x_0) \end{align*}
Nota: [f \times g \times h]' = f' \times g \times h + f \times g' \times h + f \times g \times h'
- Rapporto
Prima trovo \left[\frac{1}{g} \right]', poi \left[ f \times \frac{1}{g} \right]'
Ricordo che \left[\frac{1}{g} \right] (x) = \frac{1}{g(x)}
\begin{align*} \lim_{h \to 0} \frac{\left[ \frac{1}{g} \right] (x_0 + h) - \left[ \frac{1}{g} \right] (x_0)}{h} &= \lim_{h \to 0} \frac{g(x_0) - g(x_0 + h)}{g(x_0 + h) \cdot g(x_0) \cdot h} \\ &= \lim_{x \to 0} \left[ -g'(x_0) \cdot \frac{1}{g(x_0 + h) \cdot g(x_0)} \right] \\ &= - \frac{g'(x_0)}{[g(x_0)]^2} \end{align*}
\begin{align*} \left[ \frac{f}{g} \right]' = \left[ f \times \frac{1}{g} \right]' &= \left[ f' \times \frac{1}{g} + f \times \frac{-g'}{g^2} \right] \\ &= \left[ \frac{f'}{g} - \frac{f \times g'}{g^2} \right] \\ &= \left[ \frac{f' \times g - f \times g'}{g^2} \right] \end{align*}
6.7 Derivata della funzione composta
Se f \colon (a, b) \to \mathbb{R}, x_0 \in (a, b), f derivabile in x_0, g \colon (c, d) \to \mathbb{R}, y_0 = f(x_0) \in (c, d), g derivabile in y_0 allora [g \cdot f] è derivabile in x_0 e [f \cdot g](x_0)' = g'(f(x_0)) \cdot f'(x_0)
6.8 Derivata della funzione inversa
Se f \colon (a, b) \to \mathbb{R} è derivabile in x_0 \in (a, b) ed è invertibile allora se g = f^{-1} e f(x_0) \ne 0 allora g è derivabile in y_0 = f(x_0) e g'(y_0) = \frac{1}{f'(x_0)}
6.9 Teorema di Fermat
Se f \colon (a, b) \to \mathbb{R}, x_0 \in (a, b) è punto di massimo o minimo relativo e f è derivabile in x_0 allora f'(x_0) = 0.
Dimostrazione
Se x_0 è minimo, con h > 0, \frac{f(x_0 + h) - f(x_0)}{h} > 0 quindi, per il teorema di permanenza del segno
\lim_{h \to 0^+} \frac{f(x_0 + h) - f(x_0)}{h} \ge 0
viceversa, se h < 0 allora
\lim_{h \to 0^-} \frac{f(x_0 + h) - f(x_0)}{h} \le 0
Se f è derivabile allora è continua e i limiti destro e sinistro sono uguali quindi
\lim_{h \to 0} \frac{f(x_0 + h) - f(x_0)}{h} = 0
Quindi
Per trovare i massimi e miimi, bisogna considerare tulle le x \colon f'(x) = 0, gli estremi del dominio e i punti dove f non è derivabile. Non vale il viceversa.
6.10 Teorema di Lagrange
Se f \colon [a, b] \to \mathbb{R}, f è continua in [a, b] e derivabile in (a, b) allora \exists c \in (a, b) \colon f'(c) = \frac{f(b) - f(a)}{b - a}
In altre parole, esiste un punto la cui derivata è parallela al segmento che va tra (a, f(a)) e (b, f(b))
Dimostrazione
Definiamo g(x) = f(x) - SEGMENTO ove SEGMENTO = \text{Segmento che va da }(a, f(a)) \text{ a } (b, f(b)) (Disegno qui) quindi
g(x) = f(x) - \left[ f(a) + \frac{f(b) - f(a)}{b - a} (x - a) \right]
e, di conseguenza g(a) = g(b) = 0
- g \in \mathcal{C}[a, b]
- g è derivabile in (a, b) in quanto differenza di funzioni derivabili
Per il teorema di Weierstrass, esistono punti di massimo e minimo assoluti:
- Se MAX e MIN si trovano agli estremi, g(x) = 0 è f è un segmento tra a e b
- Altrimenti esiste almeno un punto x_0 \in (a, b) di massimo o minimo all’interno
Nel secondo caso, vengono verificate le ipotesi del teorema di Fermat:
- g ha in x_0 un punto di massimo o minimo
- \exists g(x_0)
Di conseguenza g'(x_0) = 0, ma g'(x_0) = f'(x_0) - \frac{f(b) - f(a)}{b - a} = 0 da cui f'(x_0) = \frac{f(b) - f(a)}{b - a}
Note
Ho preso la differenza tra f e il segmento, in modo da poter rilevare un eventuale minimo o massimo con facilità.
Per Fermat, esiste per forza un punto di massimo o minimo (quindi la cui derivata è zero ed è parallelo al nuovo segmento (parallelo asse y = 0)).
Siccome conosco g (e quindi anche g'), la pongo uguale a zero e vedo che c’è effettivamente un punto nel quale la derivata di f è effettivamente parallela al segmento.
6.11 Test di monotonia
Se I è un intervallo qualsiasi, I \sube \mathbb{R} e f \colon I \to \mathbb{R} è continua e derivabile allora
- f è crescente \iff f'(x) \ge 0 \quad \forall x \in I
- f è decrescente \iff f'(x) \le 0 \quad \forall x \in I
Dimostrazione
Verrà dimostrata solo la crescenza, la decrescenza è analoga.
\implies) f crescente \iff x_1 < x_2 \implies f(x_1) \le f(x_2) \quad x_1, x_2 \in I
f'_+(x_0) = \lim_{h \to 0^+} \frac{f(x_0 + h) - f(x_0)}{h} = \frac ++ = + \\ f'_-(x_0) = \lim_{h \to 0^-} \frac{f(x_0 + h) - f(x_0)}{h} = \frac ++ = +
Per il teorema di permanenza del segno allora f'(x_0) > 0
\impliedby) f'(x_0) > 0 \quad \forall x \in I allora \forall x_1, x_2 \in I \quad x_1 < x_2,
\frac{f(x_2) - f(x_1)}{x_2 - x_1} \implies f(x_2) - f(x_1) = f'(c)(x_2 - x_1)
Questo perchè f è contnua da x_1 a x_2 (infatti (x_1, x_2) \sube I) ed è derivabile per lo stesso motivo. Per il teorema di Lagrange, \exists c \in [x_1, x_2] \colon \frac{f(x_2) - f(x_1)}{x_2 - x_1} = f'(c) quindi
- f'(c) > 0 per ipotesi (infatti f'(x) > 0)
- x_2 - x_1 > 0
da cui f(x_2) - f(x_1) \ge 0 \implies f è crescente
6.12 Teorema del tappabuchi
Se f \colon (a, b) \to \mathbb{R} è continua in (a, b) e derivabile in (a, b) salvo al più in x_0 \in (a, b) (quindi potrebbe esserlo o meno) allora, se \exists \lim_{x \to x_0} f'(x_0), allora f è derivabile in x_0 è f'(x_0) = \lim_{x \to x_0} f'(x)
Dimostrazione
In questa dimostrazione si considera solo la derivata da destra, il procedimento per la derivata da sinistra è identico
\lim_{h \to 0^+} \frac{f(x_0 + h) - f(x_0)}{h} = \lim_{h \to 0^+} f'(x_0 + \alpha h) \quad 0 < \alpha < 1 = \lim_{x \to x_0} f'(x)
6.13 Concavità e convessità
Data f \colon D \to \mathbb{R}e I \sube D, f è convessa in I se \forall x_1, x_2 \in I, \, f(x_1 + (1-\alpha)x_2) \le \alpha f(x_1) + (1-\alpha) f(x_2) \quad \forall \alpha \in [0, 1].
\begin{cases} \alpha = 1 & f(x_1) \le f(x_1) \\ \alpha = 0 & f(x_2) \le f(x_2) \\ \alpha = \frac 12 & f(\frac{x_1 + x_2}2 \le \frac{f(x_1) + f(x_2)}2) \end{cases}
Il segmento è il secondo membro della disequazione, la curva è il primo
Un segmento è convesso perchè c’è il = nel \le, se voglio un qualcosa di strettamente convesso utilizzo solo < e metto \alpha \in (a, b)
In generale, una curva è convessa se sta sotto il segmento ed è concava se sta sopra il segmento
Se f è concava o convessa in I allora si può dimostrare che f è continua in I salvo al più agli estremi.
f convessa \iff f' crescente \iff f'' > 0 (se derivabile 2 volte)
f concava \iff f' decrescente \iff f'' < 0 (se derivabile 2 volte)
Se f'' > 0 e f' = 0 ho un massimo
Se f'' < 0 e f' = 0 ho un minimo
Se f'' = 0 per ora non lo so fare
6.14 Differenziabilità e derivabilità
Se f \colon (a, b) \to \mathbb{R}, x_0 \in (a, b) allora f si dice differenziale in x_0 se \exists m \colon \lim_{h \to 0} \frac{f(x_0 + h) - f(x_0) - mh}{h} = 0.
In altre parole, f è differenziabile in x_0 se esiste una retta che l’approssima in un punto meglio di tutte le altre
Notare che se f non è differenziabile allora non è neanche derivabile.
Dalla definizione si può vedere come f differenziabile in x_0 \iff f è derivabile in x_0 con m = f'(x_0).
Ciò è vero solo per le funzioni a una variabile, nelle funzioni a 2+ variabili si guarda solo la differenziabilità perchè ci sono funzioni non continue ma comunque derivabili
- Differenziabilità \implies derivabilità: sempre vero
- Derivabilità \implies differenziabilità: valido solo nelle funzioni a 1 variabile
Si chiama Differenziale di f nel punto x_0 l’espressione df(x_0) = \underbrace{f'(x_0)}_m \cdot \underbrace{dx}_h
6.15 Teorema di Cauchy
Se f, g \in \mathcal{C}[a, b] e sono derivabili in (a, b) con g'(x) \ne 0 \quad \forall x \in (a, b) allora \exists c \in (a, b) \colon \frac{f(b) - f(a)}{g(b) - g(a)} = \frac{f'(c)}{g'(c)}
Dimostrazione (non richiesta ma non l’avevo notato)
Definisco la funzione w(x)
w(x) = f(x) - \frac{f(b) - f(a)}{g(b) - g(a)} (g(x) - g(a)) \\ w(a) = f(a) - \frac{f(b) - f(a)}{g(b) - g(a)} (g(a) - g(a)) = f(a) \\ w(b) = f(b) - \frac{f(b) - f(a)}{g(b) - g(a)} (g(b) - g(a)) = g(a)
Per il teorema di Rolle, \exists c \in (a, b) \colon w'(c) = 0
w'(c) = f'(c) - \frac{f(b) - f(a)}{g(b) - g(a)} \cdot g'(c) \\ \begin{align*} w'(c) = 0 &\iff f'(c) = \frac{f(b) - f(a)}{g(b) - g(a)} \cdot g'(c) \\ &\iff \frac{f'(c)}{g'(c)} = \frac{f(b) - f(a)}{g(b) - g(a)} \end{align*}
Ho ottenuto la tesi.
6.16 Teorema di l’Hopital
Se f, g \colon (a, b) \to \mathbb{R}, f, g \underset{x \to a^+}{\longrightarrow} 0 \text{ oppure } \pm \infty, allora se g' \ne 0 in (a, b) e se \exists \lim_{x \to a^+} \frac{f'(x)}{g'(x)} = L allora \exists \lim_{x \to a^+} \frac{f(x)}{g(x)} = L
Questo teorema si utilizza quando ci si trova in una forma d’indecisione del tipo \frac 00 oppure \frac \infty \infty. Solitamente è possibile arrivare alla soluzione anche senza utilizzare l’Hopital, l’unico caso in cui è ammesso utilizzarlo è quando si deve calcolare la m dell’asintoto obliquo di una funzione integrale.
Dimostrazione (non richiesta ma non l’avevo notato)
Se x \to a \implies f, g \to 0 allora f(a) = 0 e f(b) = 0 e, per Cauchy,
\frac{f(x)}{g(x)} = \frac{f(x) - f(a)}{g(x) - g(a)} = \frac{f'(c)}{g'(c)} \qquad a < c < x
quindi
\lim_{x \to a^+} \frac{f(x)}{g(x)} = \lim_{x \to a^+} \frac{f'(c)}{g'(c)} = \lim_{c \to a^+} \frac{f'(c)}{g'(c)}
Capitolo Sette: Polinomi di Taylor e di MacLurin
I polinomi di Taylor e MacLaurin servono ad approssimare una funzione nell’intorno di un punto in maniera molto precisa.
Data una f \in \mathcal{C}^n(a, b) e x_0 \in (a, b) , allora esiste un unico polinomio che ha in comune con f il valore di tutte le derivate fino all’ordine n:
T_{n, x_0} = f(x_0) + f'(x_0)(x - x_0) + f''(x_0) \frac{(x - x_0)^2} 2 + f'''(x_0) \frac{(x - x_0)^3}{3!} + \dots + f^{(n)}(x_0) \frac{(x - x_0)^n}{n!}
Questo polinomio vine chiamato Polinomio di Taylor di grado n centrato in x_0.
Con x \to x_0, f(x) \sim T_{n, x_0}, da cui f(x) = T_{n, x_0} + resto.
Con x_0 = 0 il polinomio prende il nome di Polinomio di MacLaurin
7.1 Formula di Taylor con resto secondo Peano
Se f \in \mathcal{C}^n(a, b) allora f(x) = T_{1, x_0}(x) + \small o((x - x_0)^n)
In questo caso il resto è solo qualitativo, non abbiamo indicazioni oltre al fatto che è di un ordine di infinitesimo superiore rispetto al polinomio.
7.2 Formula di Taylor con resto secondo Lagrange
Se f \in \mathcal{C}^{n + 1}(a, b) allora f(x) = T_{n, x_0}(x) + f^{(n+1)}(c) \frac{(x - x_0)^{n+1}}{(n + 1)!} con c \in (x, x_0)
Esempio chiarificatore
Se \sin x = x - \frac{x^3}{3!} + \frac{x^5}{5!} - (\sin c)\frac{x^6}{6!}, x_0 = 0, x = \frac 1 2 e quindi 0 < x < \frac 1 2, quanto vale l’errore?
|err| = (\sin c) \frac{\left(\frac 1 2 \right)^6}{6!} \implies 0 < \sin c < \sin \frac 1 2 < \frac 1 2 \implies (\sin c) \frac{\left( \frac 1 2 \right)^6}{6!} < \frac{\left( \frac 1 2 \right)^7}{6!} = \frac{1}{720 \cdot 128} \simeq \frac{1}{75000}
7.3 Sviluppi noti da sapere a memoria
| Funzione | Sviluppo di MacLaurin |
|---|---|
| e^x | 1 + x + \frac{x^2}{2} + \frac{x^3}{3!} + \frac{x^4}{4!} + \dots + \frac{x^n}{n!} + \small o(x^n) |
| \sinh x | x + \frac{x^3}{3!} + \frac{x^5}{5!} + \dots + \frac{x^{2n+1}}{(2n+1)!} + \small o(x^{2n + 1}) |
| \cosh x | 1 + \frac{x^2}{2!} + \frac{x^4}{4!} + \dots + \frac{x^{2n}}{(2n)!} + \small o(x^{2n}) |
| \cos x | 1 - \frac{x^2}{2!} + \frac{x^4}{4!} + \dots + (-1)^n \frac{x^{2n}}{(2n)!} + \small o(x^{2n}) |
| \sin x | x - \frac{x^3}{3!} + \frac{x^5}{5!} + \dots + (-1)^n \frac{x^{2n+1}}{(2n+1)!} + \small o(x^{2n+1}) |
| \ln (1+x) | x - \frac{x^2}{2} + \frac{x^3}{3} - \frac{x^4}{4} + \dots + (-1)^{n+1} \frac{x^n}{n} + \small o(x^n) |
| (1 + x)^\alpha | 1 + \alpha x + \binom{\alpha}{2}x^2 + \binom{\alpha}{3}x^3 + \dots + \binom{\alpha}{n}x^n + \small o(x^n) |
Per ricordare seno e coseno, sia iprbolico che non, è necessario sapere soltanto lo sviluppo di e^x: siccome \sinh x + \cosh x = e^x allora, siccome \sinh è dispari, prendo i termini dispari dello sviluppo di e^x e faccio lo spesso con i termini pari per \cosh.
Per trovare \sin e \cos basta prendere gli sviluppi di \sinh e \cosh ma con segno alterno davanti ad ogni termine della somma.
Capitolo Otto: Calcolo Integrale
Dato un intervallo [a, b] e f \colon [a, b] \to \mathbb{R} limitata
S_n = \sum_{i = 1}^n f(t_i)(x_i - x_{i-1}) \quad t_i \in [x_{i-1}, x_i] \\ S_n = \frac{b - a}{n} \sum_{i=1}^n f(t_i).
Se \exists \lim_{n \to \infty} S_n e non dipende dalla scelta dei t allora f è integrabile su [a, b]:
\int_a^b f(x) \, dx = \lim_{n \to \infty} S_n
Se f è integrabile su [a, b] allora si dice che f \in \mathcal{R}[a, b]
8.1 Criteri di integrabilità
- Se f \in \mathcal{C}[a, b] allora f \in \mathcal{R}[a, b]
- Se f \in \mathcal{C}(a, b] ed esiste finito \lim_{x \to a^+} f(x) allora f \in \mathcal{R}[a, b]
- Se f monotona su [a, b] allora f \in \mathcal{R}[a, b]
- Se f ha discontinuità in x_0 \in (a, b) allora f \in \mathcal{R}[a, b]
- Se f \in \mathcal{C}[a, b] e g \in \mathcal{C}[b, c] e h(x) = \begin{cases} f(x) \quad & a \le x < b \\ \dots \quad & x = b \\ g(x) \quad & b < x \le c \end{cases} allora h \in \mathcal{R}[a, c]
8.2 Interpretazione geometrica
Con l’integrale si può calcolare l’area che va dalla curva all’asse x ed è limitata da y = a e y = b: se dA = f(x) \, dx allora A = \int_a^b dA = \int_a^b f(x) \, dx (l’area totale è la somma delle varie aree infinitesime).
Funziona allo stesso modo col volume del solido ottenuto ruotando la curva attorno all’asse x: dV = \pi (f(x))^2 \, dx e V = \int_a^b \, dV = \int_a^b \pi(f(x))^2 \, dx (il volume totale è la somma dei vari volumi infinitesimi)
8.3 Proprietà delle integrali
Linearità
Se f, g \in \mathcal{R}[a, b] allora (\alpha f + \beta g) \in \mathcal{R}[a, b] e
\int_a^b \left[ \alpha f(x) + \beta g(x) \right] \, dx = \alpha \int_a^b f(x) \, dx + \beta \int_a^b g(x) \, dx
infatti
\frac{b - a}{n} \sum [\alpha f(t_i) + \beta g(t_i)]
converge.
Additività
Se f \in \mathcal{R}[a, b] e f \in \mathcal{R}[b, c] allora f \in \mathcal{R}[a, c] e
\int_a^b f(x) \, dx + \int_b^c f(x)\, dx = \int_a^c f(x) \, dx \\ \int_p^q f(x) \, dx = - \int_q^p f(x) \, dx
Monotonia
Se f, g \in \mathcal{R}[a, b] e f(x) \le g(x) \quad \forall x allora
\int_a^b f(x) \, dx \le \int_a^b g(x) \, dx
Corollario
-|f(x)| \le f(x) \le |f(x)| \\ -\left|\int_a^b f(x) \, dx \right| \le \int_a^b f(x) \, dx \le \left|\int_a^b f(x) \, dx \right| \\ \left| \int_a^b f(x) \, dx \right| \le \int_a^b |f(x)| \, dx
8.4 Media integrale
Se f \in \mathcal{R}[a, b] la media integrale di f su [a, b] è
M_f = \frac{1}{b - a} \int_a^b f(x) \, dx
8.5 Teorema della media integrale
f \in \mathcal{C}[a, b] \implies \exists c \in [a, b] \colon f(c) = \frac{1}{b - a} \int_a^b f(x) \, dx
Dimostrazione
Dato m \le f(x) \le M allora
\int_a^b m \, dx \le \int_a^b f(x) \, dx \le \int_a^b M \, dx \\ m(b - a) \le \int_a^b f(x) \, dx \le M(b - a) \\ m \le \frac{1}{b - a} \int_a^b f(x) \, dx \le M
e, di conseguenza,
\exists c \in [a, b] \colon f(c) = \frac{1}{b - a} \int_a^b f(x) \, dx
8.6 Primitiva
Se f \colon [a, b] e f(x) = F'(x) \quad \forall x \in [a, b], F si dice primitiva di f.
Se f \in \mathcal{C}[a, b] allora F ammette primitiva su [a, b].
Se f ha in x_0 una discontinuità a salto, f non ammette primitiva.
8.7 Teorema fondamentale del calcolo integrale - 1
Se f \in \mathcal{C}[a, b] e G è la sua primitiva allora
\int_a^b f(x) \, dx = G(b) - G(a) = [G(x)]_a^b
Dimostrazione
\begin{align*} G(b) - G(a) = G(x_n) - G(x_0) &= (G(x_n) - G(x_{n - 1})) + (G(x_{n - 1}) - G(x_{n - 2})) + \dots + (G(x_1) - G(x_0)) \\ &= \sum_{i = 1}^n [G(x_i) + G(x_{i - 1})] = \sum_{i = 1}^{n} G(t_i)(x_i - x_{i - 1}) \underset{n \to \infty}{\longrightarrow} \int_a^b f(x) \, dx \end{align*}
8.8 Integrazione per parti
Se F, G : [a, b] \to \mathbb{R} derivabili e f = F', g = G' allora
\int_a^b F(x)g(x) \, dx = [F(x)G(x)]_a^b - \int_a^b f(x)g(x) \, dx \implies \int F(x)g(x) \, dx = [F(x)G(x)] - \int f(x)g(x) \, dx
Dimostrazione
\frac{d}{dx} (F(x)G(x)) = F(x)g(x) + f(x)G(x) \implies \int_a^b [F(x)g(x) + f(x)G(x)] \, dx = [F(x)G(x)]_a^b
8.9 Integrazione per sostituzione
Sia \varphi \colon [a, b] \to \mathbb{R} invertibile e derivabile: \varphi(a) = \alpha, \varphi(b) = \beta, f \in \mathcal{C}[a, b] allora
\int_a^b f(\varphi(t))\varphi'(t) \, dt = \int_\alpha^\beta f(\tau) \, d\tau \qquad \tau = \varphi(t)
Ricordo che y = f(x) \implies dy = f'(x) \, dx
Dimostrazione
\int_\alpha^\beta f(\tau) \, d\tau = [F(\tau)]_\alpha^\beta = F(\beta) - F(\alpha)
\int_a^b f(\varphi(t))\varphi'(t) \, dt = [F(\varphi(t))]_a^b = F(\varphi(b)) - F(\varphi(a)) = F(\beta) - F(\alpha)
8.10 Integrazione di funzioni razionali
Sia \int \frac{P_n(x)}{Q_m(x)} \, dx, n < m e m = 1,2 allora
- m = 1: \int \frac{k}{ax + b} \, dx = \frac{k}{a} \int \frac{a}{ax + b} \, dx
- m = 2: \int \frac{3x + 5}{x^2 + x - 2} \, dx = \int \frac{\frac{8}{3}}{x - 1} \, dx + \int \frac{\frac{1}{3}}{x + 2} \, dx = \frac{8}{3} \ln |x - 1| + \frac{1}{3} \ln |x + 2| + c
8.11 Funzioni integrali
Se f \colon [a, b] \to \mathbb{R} è integrabile in tutti l’intervallo [a, b] e x_0 \in [a, b] allora \int_{x_0}^x f(t) \, dt è una funzione che dipende da x.
G(x) = \int_{x_0}^x f(t) \, dt è la funzione integrale della funzione f centrata in x_0.
8.12 Teorema fondamentale del calcolo - 2
Ricordo che il rpimo era \int_a^b f'(x) \, dx = f(b) - f(a)
Se f \colon [a, b] \to \mathbb{R} è integrabile (propriamente o meno) nell’intervallo [a, b] e converge e x_0 \in [a, b] allora G(x) = \int_{x_0}^x f(t) \, dt e G è continua su [a, b].
Se f è continua su [a, b] allora G è derivabile su [a, b] e G'(x) = f(x) \quad \forall x \in [a, b].
Dimostrazione
Se f è invertibile in senso proprio (quindi f è limitata su [a, b] e, di conseguenza, \forall x \in [a, b] \implies |f(x)| < k), G è continua in x^*, allora
- G è continua in x^* se \lim_{x \to x^*} G(x) = G(x^*)
- \lim_{h \to 0} [G(x^* + h)] = G(x^*)
- \lim_{h \to 0} [G(x^* + h) - g(x^*)] = 0
Utilizzo la terza per la dimostrazione.
\lim_{h \to 0} [G(x^* + h) - G(x^*)] = \lim_{h \to 0} \left[ \int_{x_0}^{x_0 + 1} f(t) \, dt \right] = \lim_{h \to 0} \left[ \int_{x_0}^{x^* + h} f(t) \, dt - \int_{x_0}^{x^*} f(t) \, dt \right] = \lim_{h \to 0} \left[ \int_{x^*}^{x^* + h} f(t) \, dt \right] = 0 \\ \left| \int_x^{x_0 + h} f(t) \, dt \right| \le |h| \cdot k \text{ ma } h \to 0 \text{ quindi } |h| \cdot k = 0
Per far veder che è derivabile, faccio il limite del rapporto incrementale:
\lim_{h \to 0} \left[ \frac{G(x^* + h) - G(x^*)}{h} \right] = \lim_{h \to 0} \underbrace{\frac{1}{h} \int_{x^+}^{x^+ + h} f(t) \, dt}_{\text{Media integrale}}
per il teorema della media integrale
\begin{align*} &= \lim_{h \to 0} f(x^* + \alpha h) \qquad (\text{con } o \le \alpha \le 1) \\ &= \lim_{h \to 0} (f^* + \alpha h) = f(x^*) \end{align*}
Da cui segue che la derivata di G è f.
Dimostrazione alternativa
Se G è continua in x^*, allora
\begin{align*} &\lim_{x \to x^*} G(x) = G(x^*) \\ \implies &\lim_{h \to 0} G(x^* + h) = G(x^*) \\ \implies &\lim_{h \to 0} [G(x^* + h) - G(x^*)] \\ &=\lim_{h \to 0} \left[ \int_{x_0}^{x^* + h} f(t) \, dt - \int_{x_0}^{x^*} f(t) \, dt \right] \\ &= \lim_{h \to 0} \int_{x^*}^{x^* + h} f(t) \, dt &= \left| \int_{x^*}^{x^* + h} f(t) \, dt \right| \le |h| \cdot k \to 0 \end{align*}
\begin{align*} \lim_{h \to 0} \left[ \frac{G(x^* + h) - G(x^*)}{h} \right] &= \lim_{h \to 0} \underbrace{ \frac{1}{h} \int_{x^*}^{x^* + h} f(t) \, dt }_{\text{Media integrale}}\\ &= \lim_{h \to 0} f(x^* + \alpha h) \qquad (0 \le \alpha \le 1) \\ &= f(x^*) \end{align*}
Note
Nel primo passaggio ho trovato che il limite del numeratore del rapporto incrementale è pari all’integrale (che poi ho visto essere limitata).
Nella seconda parte noto che il rapporto incrementale è scrivibile sotto forma
E se la x nell’integrale fosse f(x)?
\int_{x_0}^{i(x)} f(t) \, dt = G(i(x)) \qquad \left( \text{con } G(x) = \int_{x_0}^x f(t) \, dt\right)
di conseguenza è una funzione composta e si deriva come tutte le funzioni composte
\left[ \int_{x_0}^{i(x)} f(t) \, dt \right]' = f(x) \cdot i'(x)
E se invece l’integrale avesse a(x) e b(x) al posto di x_0 e x?
Sia F(x) = \int_{a(x)}^{b(x)} g(t) \, dt e G primitiva di g allora
\begin{align*} F(x) &= \int_{a(x)}^{b(x)} g(t) \, dt = [G(x)]_{a(x)}^{b(x)} = G(b(x)) - G(a(x)) \\ \implies F'(x) &= G'(b(x)) \cdot b'(x) - G'(a(x)) \cdot a'(x) \\ &= g(b(x)) \cdot b'(x) - g'(a(x)) \cdot a'(x) \end{align*}
8.13 Integrali generalizzati
Dato \int_a^b f(x) \, dx, cosa succede se b = \infty o se f(x_0 \in (a, b)) = \pm \infty? (quindi se la f o l’intervallo non sono limitati)
Nel primo caso, si porta f(x) nella forma \frac{1}{x^\alpha} \quad (x \to \infty): se \alpha > 1 converge, altrimenti diverge.
Se converge, per calcolarne il valore, è sufficiente il seguente calcolo:
\int_a^{+\infty} f(x)\, dx = \lim_{R \to +\infty} [F(x)]_a^R = \lim_{R \to +\infty} F(R) - F(a)
Nel secondo caso, si porta f(x) nella forma \frac{1}{x^\beta} \quad (x \to x_0): se \beta < 1 converge, altrimenti diverge.
Se converge, per calcolarne il valore, è sufficiente il seguente calcolo:
con f(b) = +\infty
\int_a^b f(x) \, dx = \lim_{\varepsilon \to 0}\int_a^{b - \varepsilon} f(x) \, dx = \lim_{\varepsilon \to 0} [F(x)]_a^{b - \varepsilon}
I due calcoli inglobano anche il controllo di convergenza: se il risultato è \pm \infty allora divergono mentre se il limite non esiste allora non sono proprio integrabili.
Se un integrale risulta essere improprio in più punti, lo so spezza in quei punti e poi si va a verificare la convergenza di tutte le varie parti: se almeno una di esse diverge allora l’integrale originale diverge.
8.14 Criteri di convergenza per integrali generalizzati
I criteri di convergenza per integrali generalizzati funzionano in maniera simile a quelli per le serie (con l’eccezione che il criterio del rapporto e della radice qui non esistono).
Entrambi i criteri applicabili (quello del Confronto e quello del Confronto asintotico) si applicano a funzioni definite positive sull’intervallo di integrazione (se sono definite negative, raccolgo il meno).
Criterio del confronto
Siano f(x), g(x) > 0 e f(x) \le g(x) \quad \forall x \in [a, b] allora
- se \int f(x) diverge allora anche \int g(x) diverge
- se \int g(x) converge allora anche \int f(x) converge
Criterio del confronoto asintotico
Siano f(x), g(x) > 0 e f(x) \underset{x \to \infty}{\sim} g(x) allora entrambi gli integrali hanno lo stesso carattere (entrambi convergono o entrambi divergono)